



volavoile
-
Inscription
-
Dernière visite
Messages posté(e)s par volavoile
-
-
Posté(e) ·
Modifié par volavoile
Ok, 1500W... mais pendant combien de secondes... 0,5 secondes tout au plus?
Ca te fait un petit apport d'energie de.... Merde, que dalle!
En 0.5 secondes, tu peux passer un nid de poule, ou un trottoir, oui.... mais certainement pas compenser une rupture de pente, sentir le tilt back et ralentir....
-
-
il y a 11 minutes, Pascal91 a dit :
Effectivement
") après bon 16" ou 18", vu le gain ... autant prendre une 28" pour avoir une réel différence.
après bon 16" ou 18", vu le gain ... autant prendre une 28" pour avoir une réel différence.
J’exagère un peu mais avez vous déjà roulé sur un vélo 16 et 20" ? je trouve la différence aussi médiocre pour les deux.Oui, je l'ai déjà fait... il y a environ 40 ans!!!! Mais jamais comparé en même temps à un 28"
-
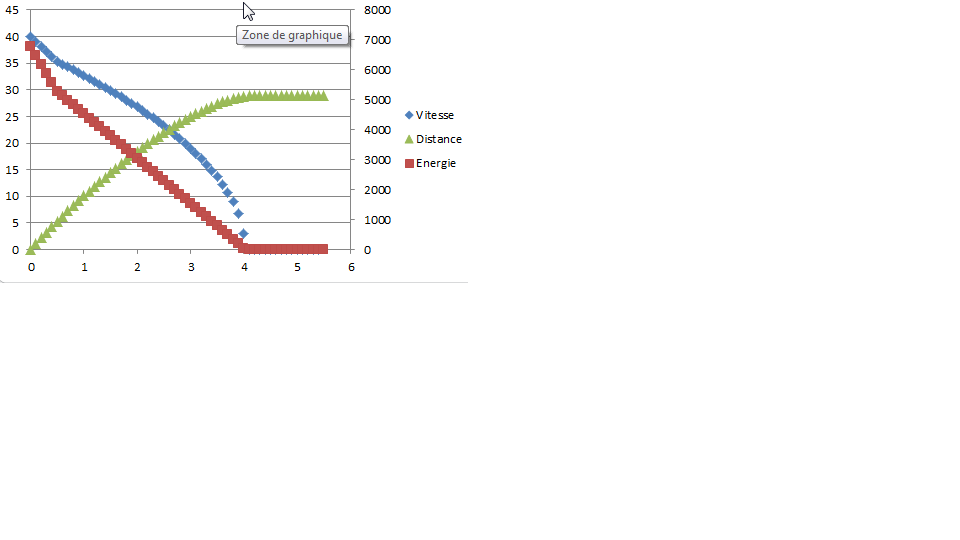
Juste pour faire un peu de physique.... je me suis prêté à un petit tableau pour simuler la distance de freinage et l'énergie, en considérant que le pilote est capable de gérer le maximum de puissance de la roue...
Une puissance en crête pendant 0.5 secondes, puis le pilote freine à la puissance maxi pendant le reste du temps jusqu'à l'arrêt...
Au final, on voit bien que la puissance de crête n'apporte pas grand chose à la distance d'arrêt, et qu'il te faudra à minima 28 mètres pour t'arrêter
 quand tu es à vitesse maxi... contre 5.5 à 25 km/h....
quand tu es à vitesse maxi... contre 5.5 à 25 km/h....
Vous pouvez jouer à mettre les paramètres qui vous sont propres... sachant que c'est de la théorie, et que en pratique, il faudrait encore prendre le rendement énergétique de la roue... les résultats obtenus ne peuvent être que moins bon que les résultats annoncés.
Après cela, il faut choisir quelle est la vitesse raisonnable...

-
C'est bien la raison pour laquelle je veux une 18 pouces pour ma prochaine roue... voire une 20 pouces!!!! Ne pas risquer un déséquilibre avec un petit trou/bosse qu'on aurait mal vu...
A ces tailles de roues, le choix est faible... KS ou Gotway
-
Pour l'accident, il y a la roue de 20 kg lancée à fond, mais aussi le pilote... et 80 kg lancé sur un gamin, ca fait de l'energie à revendre!
100 kg lancés à 40, ca fait tout de meme 6200 joules, et en bouffant le maxi de la puissance, sans parler de l'effoert de crete qui ne peut tenir que quelques dixiemes de seconde, 4,1 secondes pour arreter cette roue... et son pilote.
-
-
Ou alors, ce développement fait suite à des accidents... et dans ce cas, c'est raisonnable et non négociable! C'est tout de même pas bien gros 500w!
-
 1
1
-
-
Hé, tu peux la nettoyer un peu ta roue! Au moins, on voit que tu l'as protégée.... il tient bien ce putain d'adhésif... j'en ai chié pour l'enlever avant la vente!
-
Il y a 22 heures, TIBOPOW a dit :
Woooow... Bon et bien, ce qui est sûr c'est que me voilà prévenu ! Merci pour vos témoignages, c'est bien le genre de mise en garde que j'attendais pour me décourager. Désolé à tous ceux qui ont morflés. Je pense que je vais me contenter de vouvoyer le bitume (de loin) et donc laisser le tilt-back enclenché
 Si vous avez d'autres histoires ou avertissement, je suis preneur (et également les gens de passage sur le forum, j'imagine).
Si vous avez d'autres histoires ou avertissement, je suis preneur (et également les gens de passage sur le forum, j'imagine).
Au moins, j'ai un argument qui peut convaincre!
-
ms3 1600vs1640.
dans Begode
-
-
SLOOGH LE SAUVAGE va devenir sociable! Bien en phase avec le Sénégal! Impatient de te lire!
-
1
-
-
-
Ils sont fous.... on adore!
Par contre, pourquoi ne pas avoir pris les rustiques et fiables GW ms2?
-
Il y a 3 heures, Bataykok974 a dit :
Alors comme ça ce problème serait normal d'après Gotway ?
J'adore le concept de problème normal! Comme quoi, ne pas se précipiter pour être les premiers!
On n'entend plus de pbs sur les ninebot, alors qu'il y a moins d'un an..... comment dire! Ils règlent leurs pbs petit à petit! Pas de raison que ce soit différent pour Gotway et KS.... il y a eu des cartes mères, des fusibles....
-
Posté(e) ·
Modifié par volavoile
FautesC'est toi qui voit. Mais si tu veux rejoindre mon clan des wheeler ferraillés, vas y, enlèves les sécurités.
C'est de la conneries. .. ne le fait surtout pas! Le tilt back est la meilleure des alarmes car tu le sens même quand tu ne peux pas entendre. En général, ceux qui ont des bobos ont tous plusieurs centaines de km d'expérience. ..???
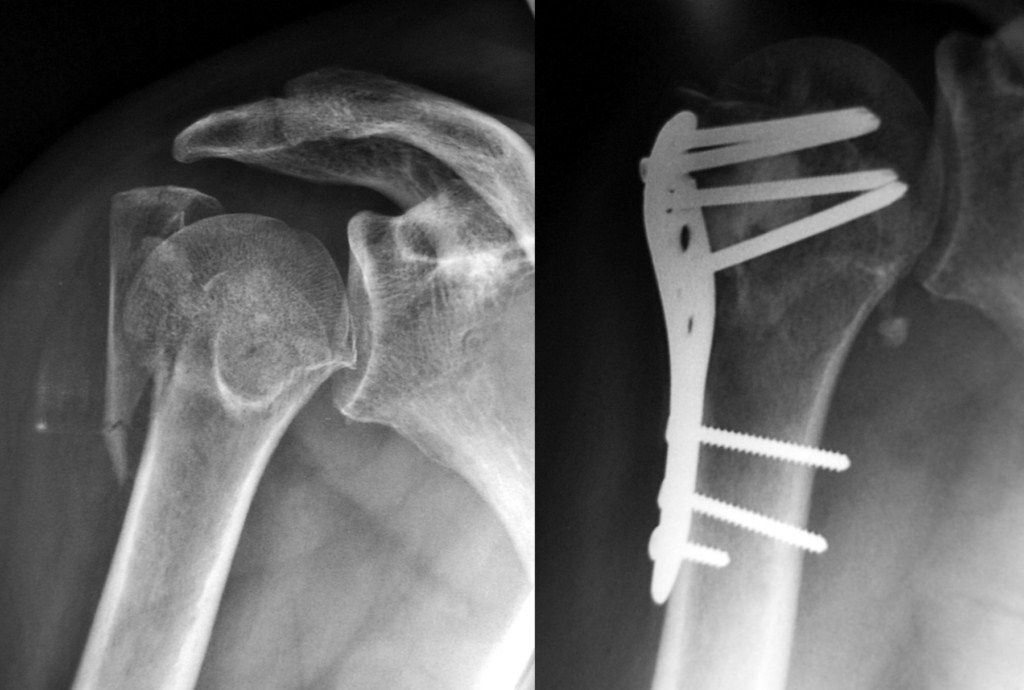
Je te garantie que l'épaule en 4 morceaux, ça pique et pas qu'un peu... et je n'étais qu'à 20 km/h!
-
2
-
-
Il y a 10 heures, RolluS a dit :
Sur les machines tournantes alimentées en alternatif, y'a un pont de diode tournant pour redresser le courant en courant.. continu.
Bah... non!!! Pas de pont de diode sur les moteurs alimentés en alternatif triphasé.. pas informaticien moi, mais électrotechnique... ça doit encore le faire pas trop mal! Bon, faut arrêter, on va vraiment perdre tout le monde dans ce post. On en reparlera dans une rando dès que je craque pour la remplaçante de ma ninebot... avec une binouze!

-
-
Le terme de pseudo sinusoïde est bien parce que le signal est carré... les convertisseurs 12 240 v te sortent une sinusoïde pour les hauts de gamme, et une pseudo sinusoïde qu'à de c'est pas cher... Qui n'est pas mieux que celle là! À un condensateur près! Et heureusement, on a un peu de filtrage sur la CM je pense!
Quand c'est cher, c'est pas forcément bien, mais quand c'est pas cher, c'est forcément pas bien!?
Oui, c'est clair que le poids du pilote, c'est une fumisterie, et là on est d'accord, ils nous donnent une puissance de déclenchement ou de grillage d'utilisation (puissance mécanique tout de même), mais pas un truc très représentatif de l'usage de nos roues... ça ne nous dit même pas la durée de la crête de la Pmax !
-
Désolé de contredire, mais on a toujours une alimentation du moteur en triphasé, même dans ce cas! Avec une pseudo sinusoïde entre A et B ou B et C ou C et À. ...
Et en fait, on s'en fout!
Le protocole d'essai des russes est intéressant, mais il ne vaut pas tripette, car il faudrait une cartographie puissance/vitesse pour en tirer quelque chose!
Le banc par contre, c'est un début!
-
-
Il y a 14 heures, RolluS a dit :
Ah, j'ai compris, oui bien vu, la description de tes expérimentations m'ont fait sortir de la théorie
Tu fais l'expérience Rollus? Je ne sais pas si on peut régler le zéro sur ta roue comme une ninebot...?
Si non, met un poids de 2 kg et tu me diras ce que tu en penses! Tu verra, la roue qui s'arrête et tombe, c'est rassurant! Quand à la roue qui accélère. .. À faire sur de l'herbe!
-
On est en phase Rollus : quand je dit que la roue doit nous prémunir d'un obstacle, ce n'est pas un obstacle qu'elle détecte, mais bien d'une gestion de réserve de puissance pour nous remettre droit sur la base d'un obstacle normalisé... qui peut être une rupture de pente, un trottoir ou je ne sais quoi... ce n'est donc pas de l'assistance à la conduite. Cette réserve de puissance doit être faite en fonction de la puissance abosbée, du poids du pilote ou autre....
En effet, rajouter sur le théorique, l'état dynamique de la batterie, de la température moteur et autre serait un vrai plus. Au même test, une roue puissante permettra d'aller plus vite qu'une roue de 350W.... mais toutes les deux devront être capable de franchir, lancée à leur vitesse maxi un obstacle (genre une pente de 15%) en ayant le temps de prévenir le pilote de baisser sa vitesse par un tilt back salvateur... avant de se mettre en cut off!
Pourquoi dériver sur la technique? En fait, l'idée n'est pas vraiment sur la technique, mais sur ce que nous pourrions demander à nos roues en terme de sécurité, ou de normalisation des systèmes de sécurité.
J'imagine bien une norme qu'un organisme puisse mettre en œuvre pour simuler le fonctionnement d'une roue et de la valider si elle passe les tests de résistance à un obstacle "normé". Cela totalement en dehors de la limitation de la vitesse maxi qui serait dicté par une loi.
-
1
-
Chute inexpliquée
dans Ninebot by Segway
Posté(e)
Si tu demandes plus que la puissance maximale, la roue n'a plus de réserve pour faire un tilt back, et même pas le temps de biper.
500W, il faut avoir conscience que ce n'est pas grand chose, et que, en fonction de ton poids (on va dire 80 kg), il te faut du temps et de la distance pour arriver à la vitesse maximale.
Les 1500 W ne durent que quelques dixièmes de secondes... on ne sait pas combien, disons 1/2 seconde...
Si tu fais ton accélération brutale en montée, c'est face plant, avec toutes les roues.
Pour atteindre ta vitesse maxi, il te faut 4.3 secondes et 21 metres..
Tu as demandé beaucoup trop à ta roue... c'est l'expérience...
Performances ninebot accélération.xlsx