hobby16
Membre
-
Inscription
-
Dernière visite
Tout ce qui a été posté par hobby16
-
-
@ertoc2 oui, tout à fait, si le mode coupure-auto du CD est activé. A noter qu'on peut aussi laisser brancher en permanence deux chargeurs au CD et ne brancher qu'un seul chargeur au secteur pour une charge normale. Quand on veut une charge rapide, on branche les deux chargeurs au secteur. Et 'ya pas à dire, qu'est ce que c'est bien une charge qui va deux fois plus vite !
-
@titi.4600, @Mingyar, @Franck Je confirme ce qu'a dit @Hansolo. Quelques précisions supplémentaires sur le branchement en parallèle (2 chargeurs voire plus), je les ai données par email en privé, je les reposte ici pour ceux qui ont un Charge Doctor V2-double entrée mais également ceux qui utilisent un adaptateur Y pour une charge rapide : 1) à vide, la tension de sortie est celle du chargeur à tension la plus élevée, les autres chargeurs sont désactivés et ne délivrent aucun courant 2) sous charge, la tension de sortie est celle de la batterie, le courant de sortie est la somme des courants de chaque chargeur quand on est dans la phase courant constant. Dans la phase tension constante, la tension est proche de celle à vide et on se ramène au cas 1) On peut par exemple brancher un chargeur 2A de Ninebot One (61V) en parallèle avec un chargeur 2A de Gotway (67,2V) pour charger une Gotway*. Tant que la tension de la batterie reste en dessous de 61V, on injecte 2+2=4A. Au dessus, le chargeur de Ninebot se coupe et c'est comme si l'on n'a plus qu'un seul chargeur. Par contre, si l'on utilise le même montage pour charger une Ninebot, quand on atteint 61V, le chargeur Gotway continue d'envoyer 2A pour essayer de faire monter la tension : il ne sait pas qu'on charge une 9b1 et qu'il faut ne faut pas dépasser 61V, le benêt ! Et adieu la batterie, la 9b1 et éventuellement le garage, voire la maison et les chatons qui vont avec. Maintenant, je prends un exemple plus réaliste, un chargeur à 67,2V et un autre à 67,3V (la dispersion est due à la tolérance des composants électroniques, il n'y a jamais deux chargeurs à tension identique à 0,1% près). Quand on est à 67,2V, le premier chargeur se désactive et sa led verte s'allume tandis que le second continue de charger et c'est tout à fait normal. Mais à cette tension, on est déjà à la toute fin de la charge où le courant a déjà bien chuté en dessous de 2A, donc de toute façon, un seul chargeur est nécessaire et ça se met en place tout seul. *cela a été essayé sans problème mais je déconseille quand même ce montage car le chargeur de GW risque de cramer des composants de l'étage de sortie du chargeur de Ninebot One au cas où celui-ci n'a pas de marge en tension.
-
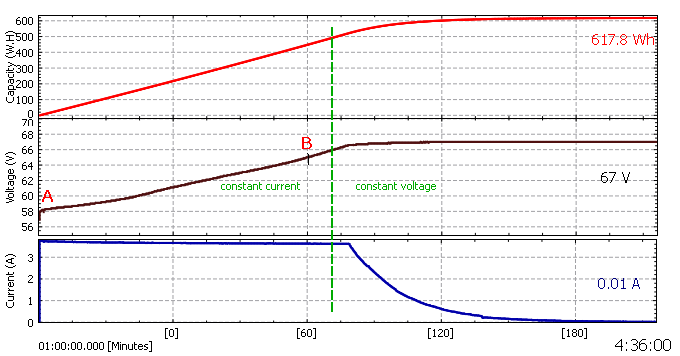
Alors, voici une esquisse de mon idée pour trouver la capacité de la batterie sans avoir à faire une décharge/recharge complète : pour un même courant de charge, plus la capacité est grande, plus il faut de temps pour augmenter d'un même delta de tension => on prend pour hypothèse qu'il y a proportionnalité entre la capacité et le coeff (delta t)/(delta V) (ce qui suppose de choisir une portion de courbe assez linéaire). A partir de là, la capacité peut être approximée par "la loi de hobby" (détails dans un futur post de mon blog) : 800*I*coef = Wh I : courant de charge coef : delta t/deta V, à prendre sur la courbe V(t) C'est une formule qui donne le bon nombre Wh de toutes mes roues, à 5% près. Si d'autres peuvent confirmer avec leurs batteries ? Exemple sur ta courbe de charge : coef est calculé entre A et B (on choisit deux points d'une portion de 1h ou 2h de tension (à peu près) linéaire et de courant constant) I = 3,65A delta t =2h, delta tension = 65,0V-58,0V = 7V => coef = 0,286h/V (en gros, il faut 0,286h = 17 minutes pour augmenter de 1V) => capacité = 800*3,65*0,286 = 835 Wh Conclusion : c'est plutôt une bonne nouvelle pour toi, fausse alerte (c'est le cas de le dire), ta batterie est bien une 840Wh. Ce qu'on apprend, c'est que la Gotway envoie une alerte "fin de batterie" très tôt alors qu'il reste encore beaucoup de Wh. Mais ça, on le sait déjà : au début je me suis inquiété, à tort, de ma batterie de GW 340Wh, exactement comme toi.
-
Oui, changer la tension, soit diminuer, soit augmenter, est très simple, c'est seulement une diode zener à souder (sur quelques rares chargeurs, c'est encore plus simple, juste un potentiomètre à tourner). Pour augmenter, c'est un peu risqué car on augmente la puissance donc le transistor de commutation risque de trop chauffer par rapport à ce qu'il a été prévu pour. Et il faut aussi vérifier que la tension du condensateur ne soit pas dépassée avec la nouvelle tension. Par contre diminuer c'est sans risque et c'est surtout très intéressant parce que les chargeurs 67,2V sont tout ce qu'il y a de plus standard et pas chers, ça permet de remplacer les chargeurs de Solowheel, Ninebot qui coûtent les yeux de la tête. P.S. Brancher un chargeur de Solowheel en parallèle avec un chargeur de GW, ça devrait en effet permettre de charger à 4A jusqu'à la tension max du Solowheel et au delà, seul le chargeur de GW restera actif donc à 2A. Mais c'est vraiment osé, 'yen a qui n'ont pas peur de faire des acrobaties avec le Charge Doctor !
-
Effectivement, il doit y avoir un moyen pour valider la vraie capacité de la batterie sans avoir à la vider, en mesurant la pente. C'est une idée qui me trotte dans la tête, je vais la valider par quelques tests et je te dis. Pour ce qui est des bips de la Gotway, il y a un moyen de les rendre moins forts et bien plus sympa, avec une simple vis, je l'ai montré quelque part soit sur mon blog, soit dans le forum de de Goboard75 (en gros, tu prends une vis à bois, tu limes la tête pour qu'elle ne soit pas pointue et tu visses ditectement dans le buzzer pour appuyer sur la membrane et le bip-bip devient bz-bz). Parce que rouler avec le bip bip de camion qui recule, 'ya pas à dire, c'est la honte quand même.
-
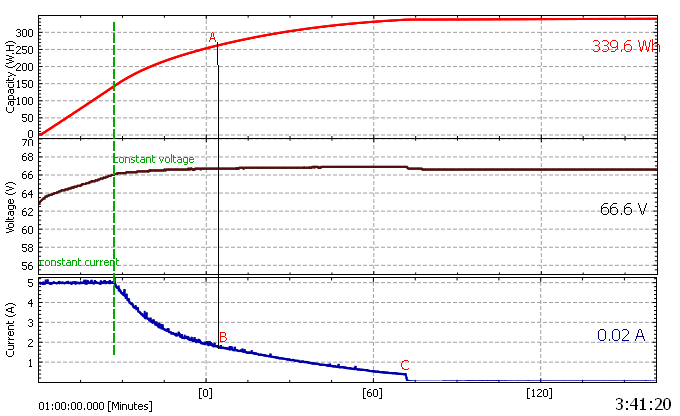
Ca demande quand même vérification car tous les chiffres ne collent pas. Sur toutes mes roues (GW, Firewheel, X3), quand je vide la batterie jusqu'au tilt-back, j'arrive à charger 100% la capacité annoncée voire un peu plus de 100% et non 90% !! Exemple, ma FW260 a une capacité annoncée de 260Wh, j'arrive à charger 270Wh. En effet, il faut s'attendre à une perte de quelques % par la chaleur lors d'une charge. Pour tester correctement, pense à désactiver la coupure automatique. Car le seuil de coupure auto à 1A ne correspond pas forcément à 90% mais varie selon la capacité de la batterie. Par exemple voici la charge d'une batterie de 850Wh (à 5A, ouh hou !!!). Si on veut arrêter à 90%, soit environ 80Wh avant la fin, le seuil de coupure doit être réglé à 1,8A, au point B (environ). La probabilité d'un défaut de batterie est forte au début et à la fin (courbe en baignoire) . Donc cette vérification initiale est très importante car un manque de capacité peut cacher des problèmes qu'il faut résoudre sans tarder, soit une triche (problème "mineur"), soit des cellules défectueuses (gros problème majeur, Domi s'est luxé l'épaule avec ça, je ne compte pas le nombre de ceux qui ont faceplanté sur les roues non shuntées à cause de cellules HS !). Une fois que la batterie est rodée après plusieurs cycles charge/décharge complètes et qu'elle s'avère sans problème, on peut alors être tranquille.
-
Bah tu pourrais tourner en tournant le guidon de la moto ou en penchant juste la monoroue. Donc pencher son corps ne sert pas à tourner mais bien à compenser la force centrifuge. Il n'y a pas vraiment de débat en fait, c'est de la physique niveau lycée. La force centrifuge F est générée par la variation du vecteur vitesse (a=dv/dt en vecteurs). Cette force là doit être compensée par la réaction R du sol. Si tu ne te penches pas, R est dirigé vers le haut, donc F n'est pas compensée et t'envoie dans le décor. Si tu te penches, R aura une composante horizontale dirigé vers l'intérieur de la courbe qui permet de compenser F. L'effet gyroscopique est négligeable ici par rapport à l'inertie ! Prends par exemple un vélo de course, jante carbone ultra-légère et roue ultrafine. Tu imagines bien que l'effet gyroscopique d'une telle roue est minime et ne rentre pas en jeu surtout aux vitesses angulaires en question (d'ailleurs, personne ne s'avise de parler d'effet gyroscopique pour un vélo, ou peut-être pour du sport niveau olympique !). Et pourtant, même sans effet gyroscopique, dans les virages, un cycliste se penche pareil qu'un wheeler, parce qu'il s'agit justement d'autre chose que l'effet gyroscopique. En général, j'ai tendance à grincer des dents quand j'entends "effet gyroscopique" pour la monoroue car souvent c'est utilisé à tort (même si ça fait savant). Attention, le seul effet gyroscopique qui compte vraiment ici, c'est celui utilisé par le capteur de la carte électronique. Tout le reste peut se raisonner avec la deuxième loi de Newton. L'effet gyroscopique peut être négligé car il ne joue qu'à la marge compte tenu des faibles vitesse de rotation en jeu. Ceux qui ne sont pas convaincus n'ont qu'à faire quelques application numériques simples pour comparer des ordres de grandeur. Donc finalement, on est d'accord
-
Salut tout le monde, je passe faire un petit coucou car l'Inmotion m'intéresse depuis longtemps, plus spécialement la V3 à double roue, c'est pour ma femme comme dirait un certain inspecteur. Merci de la discussion et de toutes les infos. Juste une remarque, une gyroroue ne peut par construction "corriger l'assiette" que dans le plan transversal avant-arrière, pas dans le plan latéral gauche-droite (c'est le rider qui s'occupe de l'équilibre latéral). Mais quand on tourne, on est obligé de se pencher (très méchamment à grande vitesse dans mon cas car j'aime bien ça) vers l'intérieur de la courbe, tout simplement pour compenser la force centrifuge. La roue est alors penchée latéralement et normalement, l'ago ne devrait pas chercher à la redresser. Le problème est que les assiettes transversales et latérales ne sont pas des mesures directes, elles sont déduites de trois capteurs d'accélérations XYZ qui mesurent l'écart par rapport à l'accélération de la pesanteur pour calculer les assiettes, par un filtre de Kalman par exemple (qui peut intégrer éventuellement les données des 3 gyroscopes XYZ). C'est ce qui se fait avec le capteur Invensense MPU 6500 ou leurs équivalents qui équipent toutes nos roues et accessoirement tous les multicopters. Avec un filtre Kalman bien réglé, se pencher vers l'intérieur pour tourner change l'assiette latérale mais ne génère aucune composante transversale donc aucune correction d'assiette. Mais il se peut que le filtre de Kalman soit mal réglé, par négligence et absence de bon diagnostic du problème auquel cas, on aurait une composante transversale non nulle à la sortie du filtre. L'algo va chercher alors à redresser la roue exactement comme avec un tilt-back en ligne droite donc forcément ça nous oblige à ralentir, d'où la difficulté à tourner. Si c'est vraiment ça, c'est très probablement plus par incompétence que par intention. Parce que faire exprès de rendre la rotation difficile, ce serait vraiment tordu. Quoi que des trucs tordus, du genre la coupure de courant pour excès de vitesse sur les GW, on en a déjà vu ! Tout cela au conditionnel bien sûr (sauf les trucs tordus).