Classement
-
Techos78
Membre5Points8230Compteur de contenus -

matou77
Membre5Points2177Compteur de contenus -
Cool_Hands
Membre4Points113Compteur de contenus -
maitrelanceur
Membre3Points18Compteur de contenus



Contenu populaire
Affichage du contenu avec la meilleure réputation le 02/18/26 dans Messages
-
Mes félicitations au vendeur et à l’acheteur 🍾3 points
-
3 pointsBon...Mea culpa... Ces fameux bruits de "roulement" et autre broutage...ç etait tout betement les vis qui tienne le moteur qui etaient ,sur un coté TOUTES devissées et 2 manquais (( j avais négliger de remettre le padd en mousse autocollante dessus. En me disant que si je dois intervenir sur les vis, ça serait plus facile) 🫤 j'ai aussi vaguement envie de remplacer sévis sa tête luciforme par Davis à tête hexagonale, plus facile à serrer.... Quelqu'un a un avis sur le sujet Merci tout de même pour les conseils judicieuxMerci tout de même pour les conseils judicieux.... J'espère que ça pourra servir à quelqu'un ultérieurement3 points
-
2 pointsIl se trouve que oui (j'ai adoré tous les jeux depuis Fallout 1, et la série) mais je n'ai pas fait exprès de faire un Pip Boy, c'est juste que je suis mauvais en design 😜2 points
-
2 pointsEt c'est donc là que nous découvrons que tu es également un fan de Fallout.... 😉2 points
-
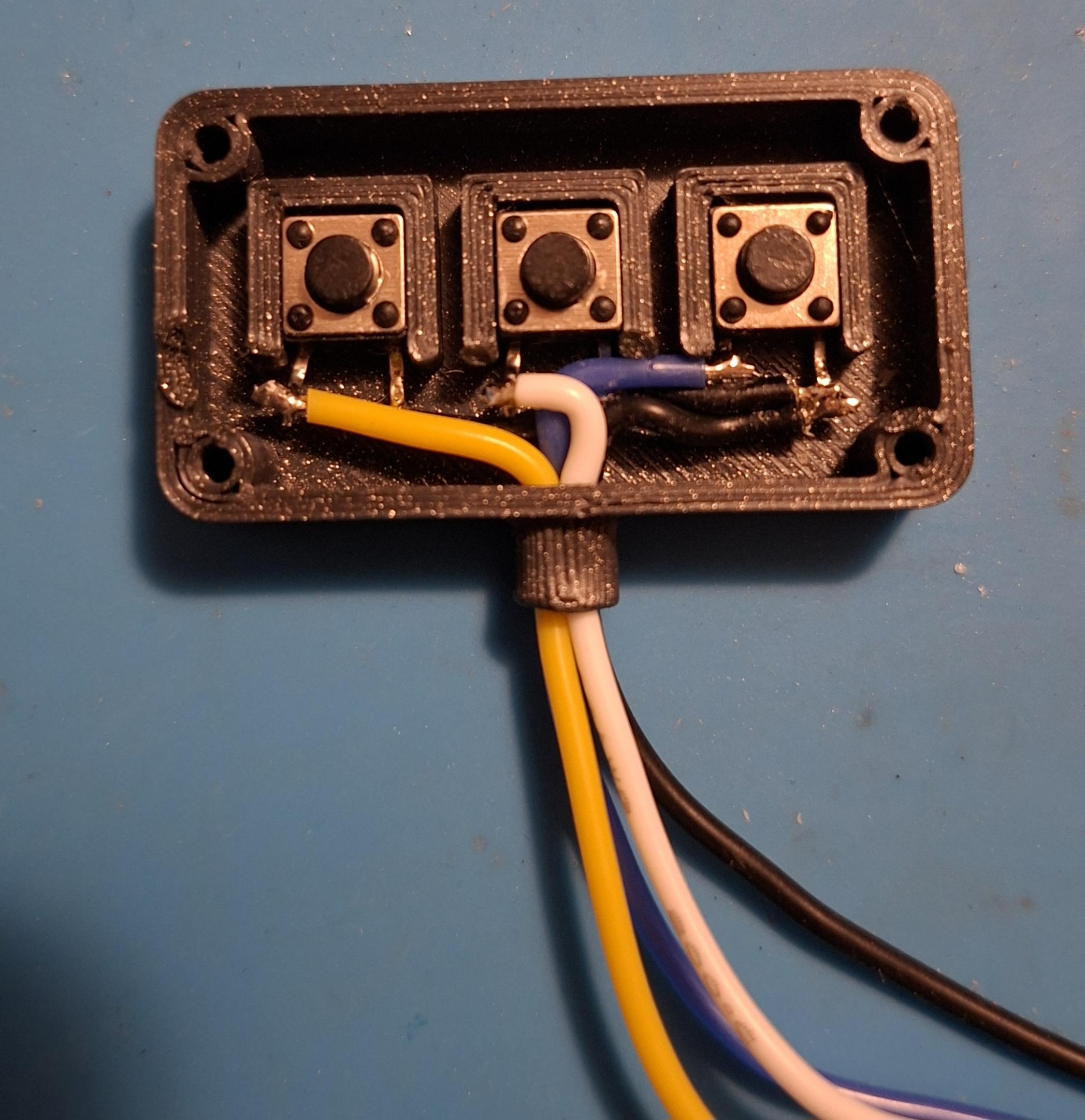
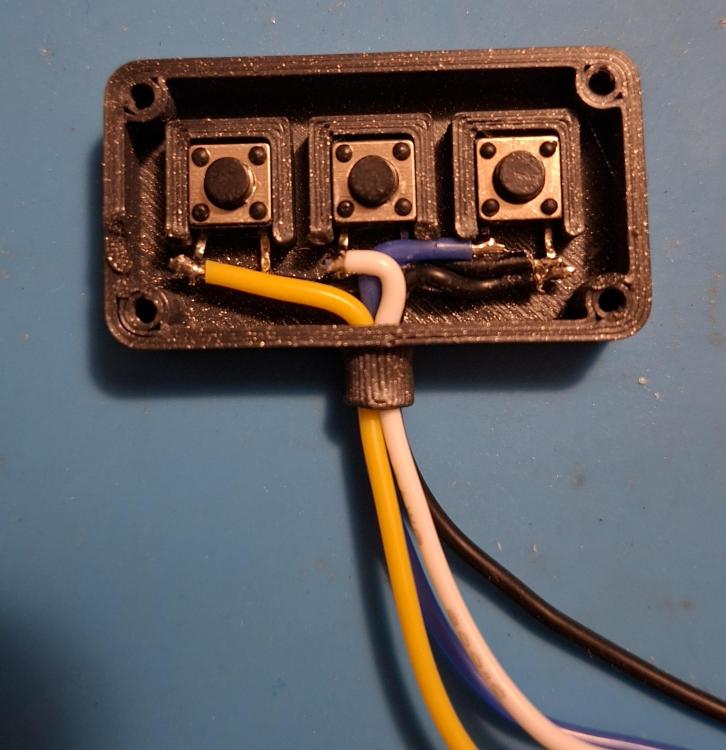
2 pointsUpdate! C'est câblé et ça fonctionne, il reste quelques ajustements à faire au niveau des passages de câbles, la gaine thermo n'adhère pas comme prévu. Il faut un petit niveau en soudure quand même (que je n'ai pas donc ne les regardez pas de trop près). Le boitier à boutons: Le boitier principal (vous vous souvenez quand j'ai décidé de faire le câble management au fil de l'eau? J'ai bien eu le temps de regretter cette décision pendant les trois longues heures passées à faire ce plat de nouilles) Et voila: Niveau soft quelques ajustements à faire aussi, j'ai périodiquement des pertes de télémétrie, ça a l'air régulier donc sans doute une trame parasite à ignorer quelque part. Plus quelques ajustements sur la gestion de la batterie 13650. Ensuite je colle tout dans GitHub. @Aerowheelex Je t'ai même fait le schéma de câblage dans le module électronique de Fusion 😁


 2 points
2 points -
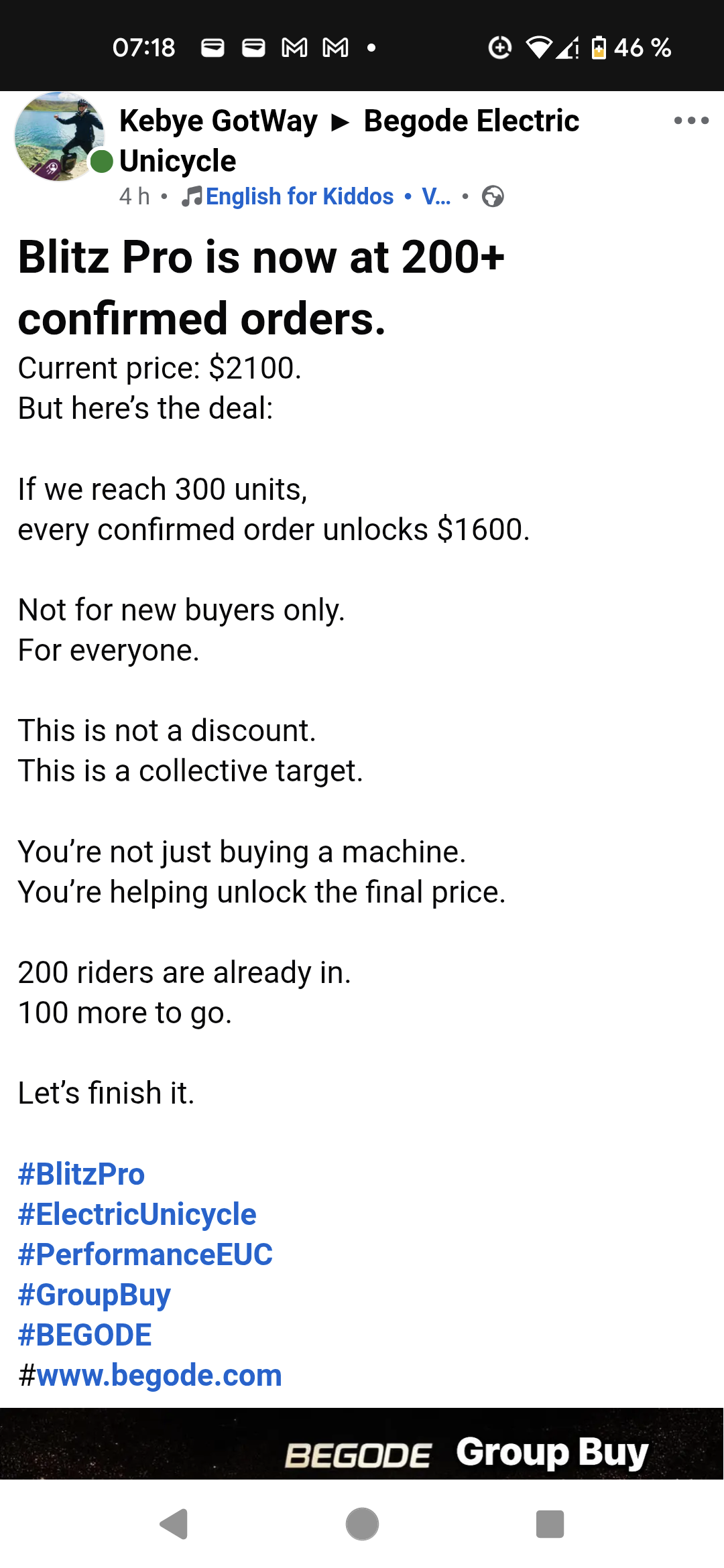
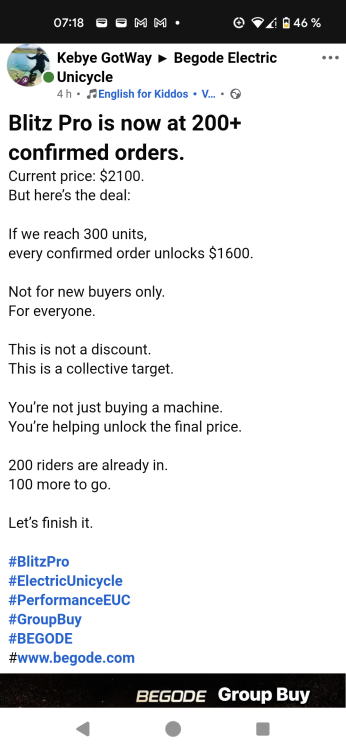
Je pose ça ici ,ça peut intéresser des gens qui n ont pas vu passer. Je ne me mouille pas plus quand au respect reel des conditions par Begode ,vu l expérience catastrophique de mes commande chez eux,mais d autre ont eu plus de chance . De mon point de vue rien n est clair dans cette vente : Pas de date de fermeture de l achat groupé. Pas de compteur de vente. Pas de délai d expédition depuis la chine Pas de délais de réception chez soi. Pas de date inscr a laquelle il faudra payer le reste de la réservation (certainement après la fermeture de la commande groupé). Délai de réception qui pourrait être a 6 mois ou plus (donc après l'été).Vous ne pouvez que croisez les doigts pour l avoir avant. Les + : le prix, actuellement a 2100$ déjà un excellent prix ,peut être 1600$ ( a la bonne foi de Begode...). Pour le moment seulement 100$ d accompte ( non remboursable quoi qu il arrive). Le seul conseil que je peut vous donner pour les intéresse et motivé,c est de payer via PayPal en cas de pépin car il sont pas trop réglo quand a un remboursement en cas de soucis de leur côté. Les rumeurs facebookienne c est que la commande groupé sera fermé en fin de nouvel an chinois...début Mars.

 1 point
1 point -
Vache ! Pas cool ça ! Elle forçait peut être quand tu t'es arrêté, des fois la roue est calée sur un cailloux ou un truc du genre et si on n'y fait pas gaffe, ça peut rapidement chauffer sérieux si le moteur tente de bouger. Pas cool du tout, y'a peut être moyen de la remettre en état ? Désolé pour toi mec ! 😒1 point
-
1 point
-
Toutes mes condoléances @efA2one pour la perte de ta roue. En espérant qu’elle puisse être réanimée à moindres frais par l’un d’entre nous, et qu’elle fasse son bonheur sur le long terme.1 point
-
1 pointLe premier gyro vibrant date des années 1850, c'est le pendule de Foucault (au Panthéon), 67 mètres et 28 kg, heureusement qu'on a miniaturisé le truc.1 point
-
1 point(edit: je n'avais pas vu le message de Techos ci dessus, on est pas très éloignés..) Si on ne trouve pas meilleure info: Il y a cinq ans je crois avoir lu que c’était autour d’une dizaines (ou deux) de fois par seconde, un chiffre pas très élevé. Ca a surement augmenté. Pour ce qui est du moteur il y a le cycle des trois phases qui dépends de la vitesse (du coup). Le découpage PWM a-t-il une fréquence indépendante ou est il aligné sur le cycle des phases? J'imagine que c'est le premier, et qui permet de trouver une fréquence qui fasse moins de bruit qu'une autre.1 point
-
1 pointSentimentalement, de part mon expérience sur les asservissements, je suppute qu'une bande passante de 20 à 25 Hz à -6dB serait suffisante pour la boucle principale (gyro), les accéléro recalent lentement (mesuré à 4°/s sur KS16b) en n'interviennent pas sur la réponse dynamique boucle fermée. La boucle est particulièrement stable car c'est quasiment un asservissement de position commandé par une rotation angulaire qui est par nature une variation d'angle qui facilite grandement la création d'avance de phase (pid) indispensable pour compenser l'inertie moteur. Les fréquences de découpage des phases moteur sont à des fréquences trèèès supérieures, "un certain nombre" de kHz, je n'ai jamais regardé. Il est possible (?) qu'il y ait deux types de découpage, car il y a deux impératifs à respecter : il faut contrôler la position du champ tournant triphasé, et il faut contrôler son amplitude. Ce sont des combinaisons vectorielles assez infernales, surtout quand on respecte la synthèse des sinusoïdes (moins de bruit, meilleur rendement)... L'asservissement, selon le déséquilibre av-ar, demande des incréments d'accélération ou de décélération à la gestion numérique de puissance. C'est intéressant à mémoriser : la boucle crée des petites variations de vitesse, et quand on retrouve l'équilibre, la vitesse reste stable. C'est pour ça qu'une roue sans pilote continue à rouler.1 point
-
1 pointBah, ce n'est pas bien grave puisqu'on le compense, il faut simplement qu'il soit stable. Le problème n'est pas simple, le mems taillé dans le silicium fait ce qu'il peut, ainsi que l'électronique d'excitation/démodulation/codage :1 point
-
1 pointÇa fait même un moment qu’on a la compensation du pedal dip, les KS qui pouvaient passer en firmware 2.x l’ont. Ma première 18XL (FW 1.x) se comportais bizarrement dans les tournants (chose dont le vendeur m’a informé après transaction 🙄), heureusement c’était juste un calibrage fait penché contre un mur. A ce propos Begode permet de régler la force de cette compensation, c’est intéressant à explorer.1 point
-
1 pointSur les "vieilles" roues, une calibration avec la roue penchée en roulis crée un tilt-front et un tilt-back fugitif quand on pivote en cap à gauche et droite. L'effet est proportionnel à la vitesse du changement de cap. L'asservissement comprend une boucle gyrométrique rapide hybridée à une boucle accéléro lente (~4°/s). En calibrant de travers, cela crée un angle parasite qui "trompe" les gyros, et cette erreur est rattrapée lentement par les accéléros. Cette erreur est lié au calcul matriciel entre l'attitude engin par rapport au repère géographique. Sur les roues récentes, les cartes mères sont réglées en usine pour compenser les biais accéléro (utilisés en inclinomètres), il suffit donc d'indiquer l'angle de tangage que l'on veut, quelle que soit la position de la roue au moment de la calibration. Par construction, un biais d'accéléro est de l'ordre de 3° maxi. Voir MPU-6000 par exemple.1 point
-
Je pense que la référence exacte du H-5102 c est 18x3 inscrit sur le pneu qui correspond a 2.75-14 .1 point
-
Retour très positif, j'ai fait seulement 1000km entre les averses, essentiellement de la route, très peu de chemins boueux car j'ai la trouille quand ça glisse. J'ai un amortisseur à ressort, dont la dureté me convient, je l'ai réglé au plus mou pour préserver mes vieux os. Le maxi de "cascade" que je me permets : descente de trottoir de 12cm. Nettement plus stable que la v11, mon allure de croisière est entre 30 et 35, rarement 40. A cette allure, mon autonomie est proche de 75 km. Donc 3 heures de rando d'une traite, sans mal au pieds, c'est impec. L'afficheur est parfait, les pédales à clous aussi. Je précise que ma roue n'a pas l'état d'origine, elle a été soigneusement préparée par @Scoulp . (pads, poignées, amortisseur etc..) J'aime cette Master. Dans "ma" boulangerie, j'entre en trollant la v11, par contre la Master reste dehors, posée sur le trottoir côté phare(s). A propos de phare, je le laisse allumé (par sécurité), je pense ne jamais éblouir car les 4 loupiotes ont un cache de clipping.1 point
-
Alors @Techos78, on a pas le droit à un petit retour sur la Master après trois mois de possession ? La V11 prend la poussière ?1 point
-
Oui c'est exactement ça ! Leaperkim protège ses roues contre ça mais pas Begode ... Et ça va faire cher si le moteur est HS .0 point