



Classement





Contenu populaire
Affichage du contenu avec la meilleure réputation le 08/06/21 dans Messages
-
3 points@EXD | Dorian T'as pas un endroit plus calme? Là on entend pas ta roue à cause du bruit des mouettes 🤔3 points
-
Gros soulagement [emoji25] Dans le post original il était aussi question d’arrêter la production des Sherman... Envoyé de mon iPhone en utilisant Tapatalk Pro2 points
-
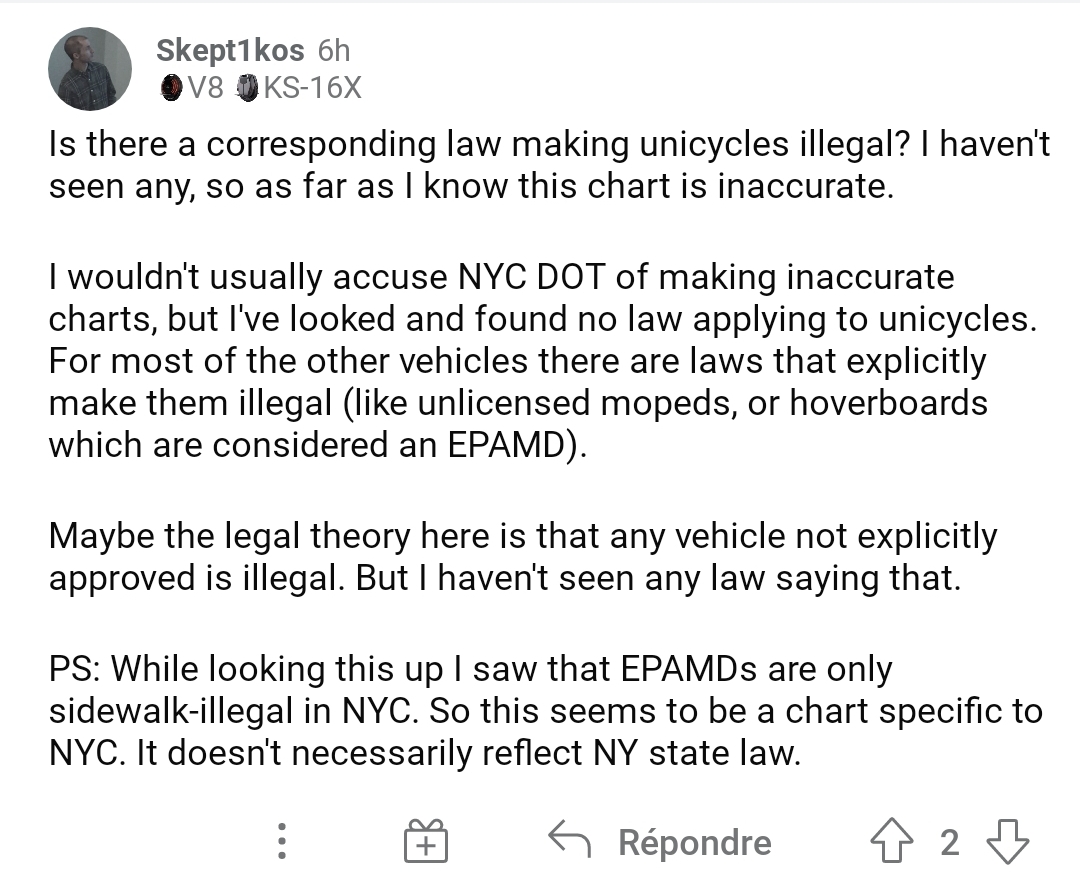
2 points2 points2 pointsIl me semble qu’elles n’ont jamais été légales et que ce graphique ne fait que rappeler la loi.. (?) edit: c’était pareil en 2017 déjà, à priori rien n’a changé. C’est Reddit qui astique des hommes de paille, normal quoi.2 points1 point1 pointwoaw.. double fracture.. en effet ça ne rigole pas la gyroroue.. navré pour toi j'ai moi aussi fait ma premiere gamelle d'hier lors de mon premier essai avec des petites chaussures bateau, bien sur sans chaussettes. La vraie mauvaise idée quoi. Aujourd'hui, c'était Bottes/Pantalon/Genouillères de moto cross. .. et béquilles (comment ça pas normal ?) Concernant le bar, OUI, tous les Wheelers sont les bienvenus chez moi, une prise extérieure vous sera toujours proposée en accès libre. https://goo.gl/maps/CECKTAhVFJ61qMeM81 point1 point1 pointQue nenni, il est inutile de demander au firmware de faire des miracles : une roue c'est bête comme chou, elle applique simplement la 3ième Loi de Newton que l'on résume à l'aide de deux mots : action ... réaction. C'est une Loi solide, à ce jour il n'y a pas d'exception. L'exemple classique est le coup de canon : faire gicler l'obus crée du recul, c'est absolument incontournable. Donc, pour avancer le moteur crée un couple entre son rotor (pneu) et son stator (lié à la coque+pédales). Pour que l'ensemble roule à vitesse constante en conservant sa position verticale, il est indispensable que le pilote exerce un couple de déséquilibre qui compense exactement le couple d'avancement. C'est trivial, il faut bien que le moteur s'appuie quelque part, et ce quelque part c'est... les tripes du pilote. Bien sûr, en réalité c'est l'inverse : le pilote impose un déséquilibre que l'asservissement annule en gérant la vitesse. Et c'est pour ça que quand on aborde une montée, le pilote doit appuyer davantage à l'avant des pédales, afin que le moteur génère un couple suffisant pour grimper. C'est la même chose quand on pousse la roue à l'aide du trolley : pour monter il faut pousser davantage, ce qui est frustrant car même avec un moteur de 2kW, c'est le pousseur qui produit l'effort. En mode trolley, l'angle des pédale n'a strictement aucune importance, et avec pilote l'angle à une légère influence, à peine quelques %, due à la projection verticale en cosinus. L'angle nul est le plus efficace, mais pas forcément le plus confortable. Les motos à vilebrequins longitudinaux (BMW...etc) ont le même problème : pour avancer le pilote est légèrement de travers, Pour bien saisir tout ça, il faut étudier un peu la physiques des engins pendulaires.1 point1 pointSalut @Philippe Sence, Pour les béquilles, ne t'inquiète pas : Il y a un précédent de taille sur le forum avec des bâtons de marche et tout le monde essaie de lui faire croire qu'il (moi) est...normal. (ou presque!) Non! L'information la plus importante c'est qu'il y a sur Agen un Bar-Tabac "wheel-friendly" où des riders en mal de prises pourraient recharger!!! Sois le bienvenu sur ce forum, ami rider.
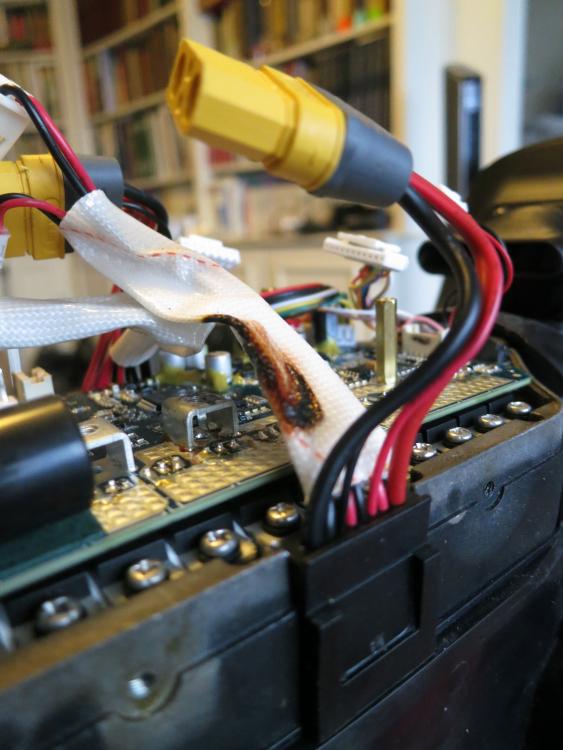
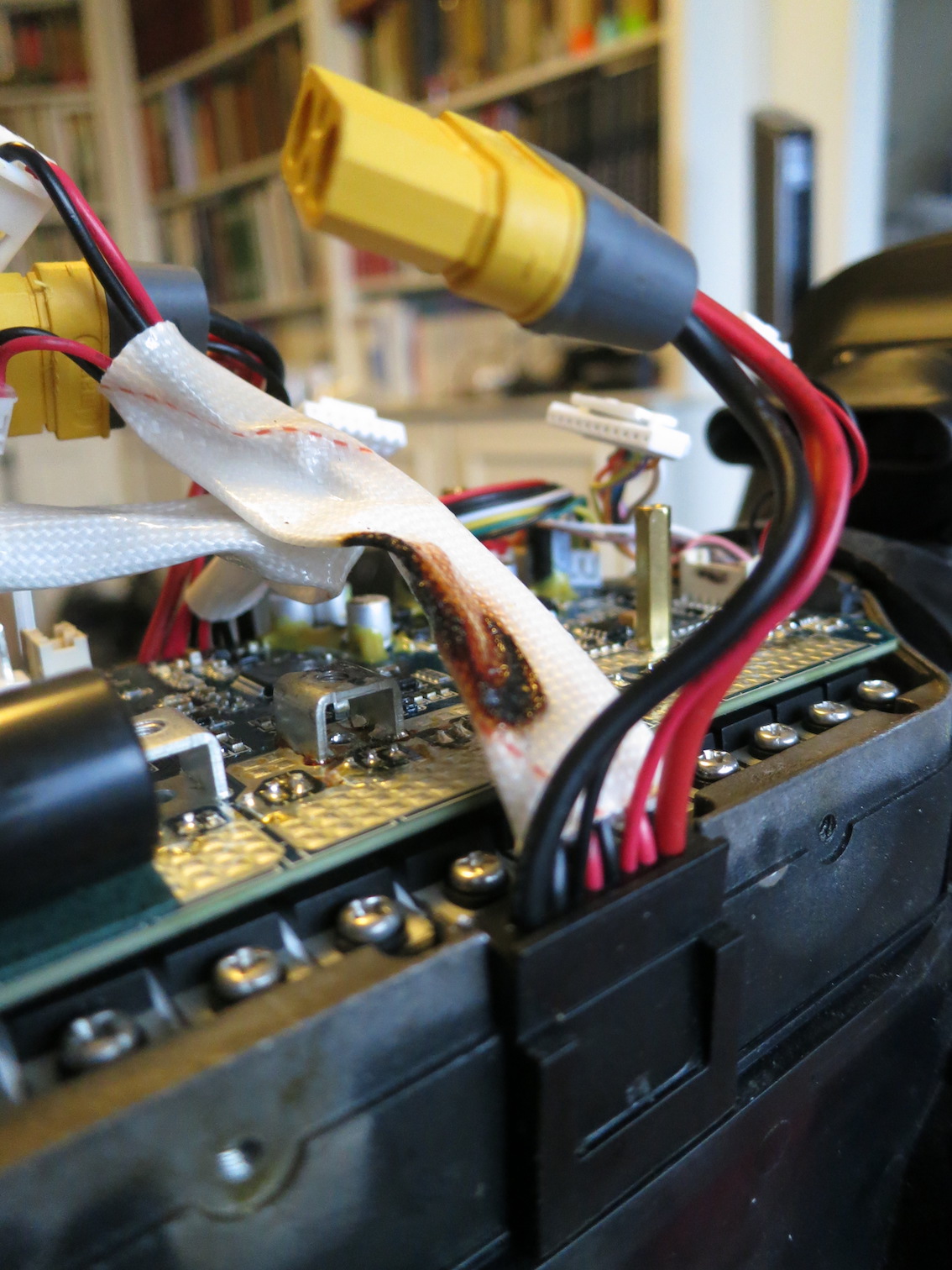
 1 point1 pointAttention je n'ai pas dit que le changement de roulement ne se justifiait pas dans tous les cas, j'ai simplement dit qu'il ne fallait pas être terrorisé au moindre bruit d'une gyroroue. Dans une bonne partie des cas le bruit vient d'un papier chewing-gum coincé entre la coque et la jante. Ma V11 fait souvent des bruits de frottements au démarrage qui disparaissent après une bonne accélération. J'approche les 3000 km avec et je ne m'en soucie pas plus que ça. Pour le début de brûlure des câbles c'est anormal mais je n'y vois pas de rapport direct avec le grippage du roulement. Le frottement plus important est pris en compte par l'algorithme de la roue dans la gestion du couple et de la puissance. Autrement dit le bip d'alerte à 80% de la puissance max se déclenche à une vitesse inférieure. Et l'autonomie diminue. Quand au bruit effectivement lorsqu'il devient continu il n'y a pas d'autre choix que l'opération à coeur ouvert 😕1 point1 pointGrippé il est simplement moins efficace. Entre un roulement grippé et un roulement serré il y a beaucoup d'étapes, et on les voit venir. Il ne faut pas croire que la roue a le moindre risque de se bloquer subitement à 45 km/h. Elle va couiner, de plus en plus fort, puis ses performances vont diminuer de plus en plus, jusqu'à ce que ce que sa vitesse maximale et son autonomie chutent franchement. Et là effectivement il faut changer le roulement. Mais d'ici là on peut faire des milliers de km... Et je pense que l'on change de roue bien avant l'étape finale 🙂1 point1 pointOui on peut y mettre les doigts dans les pédales nid d’abeille (en tout cas moi je peux, peut être si tu as des mains de géants ça ne passe pas), c’est hyper pratique pour porter la roue, pour par exemple la mettre à plat Par contre ça a un vrai inconvénient quand on ride en off-road, les racines qui surgissent subitement du sol (si si, y’en a plein quand on fait du off-road, c’est hyper sournois !) ont plein de raison de t’aider à faire un 180° 😅1 point1 pointune année non je pense pas! j'ai fait que 100km avec pour voir le " cuir" que je pense être plus du simili bas de gamme commencer à ce dépiauter...quand la parti du milieu sera hs, je pense aller voir une couturière pour remplacer cette parti avec un tissus plus solide et du coup par la même sera sur cette parti moins "glissant"1 point1 pointC'est une façon de voir les choses. Cependant, rouler plus vite avec des roulements grippés n'est pas une option que je choisirais à la légère : Il y a des fois où ça sent le roussi...
1 point1 pointAttention je n'ai pas dit que le changement de roulement ne se justifiait pas dans tous les cas, j'ai simplement dit qu'il ne fallait pas être terrorisé au moindre bruit d'une gyroroue. Dans une bonne partie des cas le bruit vient d'un papier chewing-gum coincé entre la coque et la jante. Ma V11 fait souvent des bruits de frottements au démarrage qui disparaissent après une bonne accélération. J'approche les 3000 km avec et je ne m'en soucie pas plus que ça. Pour le début de brûlure des câbles c'est anormal mais je n'y vois pas de rapport direct avec le grippage du roulement. Le frottement plus important est pris en compte par l'algorithme de la roue dans la gestion du couple et de la puissance. Autrement dit le bip d'alerte à 80% de la puissance max se déclenche à une vitesse inférieure. Et l'autonomie diminue. Quand au bruit effectivement lorsqu'il devient continu il n'y a pas d'autre choix que l'opération à coeur ouvert 😕1 point1 pointGrippé il est simplement moins efficace. Entre un roulement grippé et un roulement serré il y a beaucoup d'étapes, et on les voit venir. Il ne faut pas croire que la roue a le moindre risque de se bloquer subitement à 45 km/h. Elle va couiner, de plus en plus fort, puis ses performances vont diminuer de plus en plus, jusqu'à ce que ce que sa vitesse maximale et son autonomie chutent franchement. Et là effectivement il faut changer le roulement. Mais d'ici là on peut faire des milliers de km... Et je pense que l'on change de roue bien avant l'étape finale 🙂1 point1 pointOui on peut y mettre les doigts dans les pédales nid d’abeille (en tout cas moi je peux, peut être si tu as des mains de géants ça ne passe pas), c’est hyper pratique pour porter la roue, pour par exemple la mettre à plat Par contre ça a un vrai inconvénient quand on ride en off-road, les racines qui surgissent subitement du sol (si si, y’en a plein quand on fait du off-road, c’est hyper sournois !) ont plein de raison de t’aider à faire un 180° 😅1 point1 pointune année non je pense pas! j'ai fait que 100km avec pour voir le " cuir" que je pense être plus du simili bas de gamme commencer à ce dépiauter...quand la parti du milieu sera hs, je pense aller voir une couturière pour remplacer cette parti avec un tissus plus solide et du coup par la même sera sur cette parti moins "glissant"1 point1 pointC'est une façon de voir les choses. Cependant, rouler plus vite avec des roulements grippés n'est pas une option que je choisirais à la légère : Il y a des fois où ça sent le roussi...
 1 point1 pointChez SKF, pour des raisons obscures, les roulements sont référencés 61816-2RS ou 61916-2RS , pas de souci, ce sont les bons, le 2RS signifie joint caoutchouc des 2 côtés. Par rapport aux 6816, les 6916 sont plus grands en diamètre externe et plus épais (billes plus grosses), il faut être sûr du batch de la roue avant d'acheter... ce qui n'est pas évident, il n'y a pas de méthode claire... Là, j'ai un gros doute. Les roulements 6816 et 6916 n'ont pas la même épaisseur, je serais très surpris que les épaulements des axes creux n'aient pas été retouchés. Ce ne serait donc pas les mêmes moteurs. (juste une hypothèse). Conclusion : rouler vite rend sourd1 point1 pointMes joints et supports sont prêts, donc je verrai ce que je fais lorsque je me serai décidé à tout démonter pour changer mon pneu pour le Pirelli qui attend sagement au garage... Tout n'est plus que question de temps et de volonté 🤣
1 point1 pointChez SKF, pour des raisons obscures, les roulements sont référencés 61816-2RS ou 61916-2RS , pas de souci, ce sont les bons, le 2RS signifie joint caoutchouc des 2 côtés. Par rapport aux 6816, les 6916 sont plus grands en diamètre externe et plus épais (billes plus grosses), il faut être sûr du batch de la roue avant d'acheter... ce qui n'est pas évident, il n'y a pas de méthode claire... Là, j'ai un gros doute. Les roulements 6816 et 6916 n'ont pas la même épaisseur, je serais très surpris que les épaulements des axes creux n'aient pas été retouchés. Ce ne serait donc pas les mêmes moteurs. (juste une hypothèse). Conclusion : rouler vite rend sourd1 point1 pointMes joints et supports sont prêts, donc je verrai ce que je fais lorsque je me serai décidé à tout démonter pour changer mon pneu pour le Pirelli qui attend sagement au garage... Tout n'est plus que question de temps et de volonté 🤣 1 point1 pointIl y en a deux tailles. Si tu as une roue récente ce devrait être un 6916 (À vérifier) : Mais avec les batteries qui foirent, cela sent le retour SAV...1 point1 pointDonc maintenant tu as deux options : Retour SAV et ils te renvoient une roue avec les mêmes roulements corrects mais sans plus. Ou bien achat de 2 roulements de qualité suédoise (SKF) à 80€ l'unité et tu les changes toi-même (chalumeau ou extracteur de roulements grande taille)... Et dans les deux cas tu mets un cache en impression 3D pour protéger le joint glissant (RS) de tout ce qui serait de nature à pénétrer. C'est important! J'ai entendu chanter les mouettes sur ma V11 au bout de 1000 km. J'ai changé les roulements et mis un cache et aujourd'hui elle a 3900 km (et un pneu d'origine enfin parfait! ) . Ceci dit, je ne suis pas encore à l'abri d'une "rechute"...1 point1 pointMy video is incorrect to why there is rock / movement in the v11 suspension travel. Adding elextrical tape help keeps the air champers tighter in the sleeves. but made no difference to rocking. the reason for the horizontal (forward and backward yaw) is because of what Techo78 talks about, the Black sleeves that are on the aluminum rails. making them tighter with less tolerances with shims is likley the best option. keeping the black sleeve runners and aluminum rail clean and lubricated is very important to smooth running suspension, I use light machine oil and dry silicone spray. I am coming up to 2000km since 11th May 2021. I am conviced 3d prining some black sleeves that run the full length of the suspension travel rails is the best solution to a firmer less rocking suspension. I do not have a 3d printer and will take many trials of prining to get the optimal thickess and spacing.1 point1 pointÇa vient de reddit, je ne me permettrai pas un montage de mousses aussi dégueulasse et non symétrique 🤮😅1 point1 pointEt tu es sur que ce sont les roulements ? Ça ne pourrait pas être un frottement dans la coque ?1 point
1 point1 pointIl y en a deux tailles. Si tu as une roue récente ce devrait être un 6916 (À vérifier) : Mais avec les batteries qui foirent, cela sent le retour SAV...1 point1 pointDonc maintenant tu as deux options : Retour SAV et ils te renvoient une roue avec les mêmes roulements corrects mais sans plus. Ou bien achat de 2 roulements de qualité suédoise (SKF) à 80€ l'unité et tu les changes toi-même (chalumeau ou extracteur de roulements grande taille)... Et dans les deux cas tu mets un cache en impression 3D pour protéger le joint glissant (RS) de tout ce qui serait de nature à pénétrer. C'est important! J'ai entendu chanter les mouettes sur ma V11 au bout de 1000 km. J'ai changé les roulements et mis un cache et aujourd'hui elle a 3900 km (et un pneu d'origine enfin parfait! ) . Ceci dit, je ne suis pas encore à l'abri d'une "rechute"...1 point1 pointMy video is incorrect to why there is rock / movement in the v11 suspension travel. Adding elextrical tape help keeps the air champers tighter in the sleeves. but made no difference to rocking. the reason for the horizontal (forward and backward yaw) is because of what Techo78 talks about, the Black sleeves that are on the aluminum rails. making them tighter with less tolerances with shims is likley the best option. keeping the black sleeve runners and aluminum rail clean and lubricated is very important to smooth running suspension, I use light machine oil and dry silicone spray. I am coming up to 2000km since 11th May 2021. I am conviced 3d prining some black sleeves that run the full length of the suspension travel rails is the best solution to a firmer less rocking suspension. I do not have a 3d printer and will take many trials of prining to get the optimal thickess and spacing.1 point1 pointÇa vient de reddit, je ne me permettrai pas un montage de mousses aussi dégueulasse et non symétrique 🤮😅1 point1 pointEt tu es sur que ce sont les roulements ? Ça ne pourrait pas être un frottement dans la coque ?1 point








Information importante
Nous avons placé des cookies sur votre appareil pour aider à améliorer ce site. Vous pouvez choisir d’ajuster vos paramètres de cookie, sinon nous supposerons que vous êtes d’accord pour continuer.