

nikoo
-
Compteur de contenus
386 -
Inscription
-
Dernière visite
-
Jours gagnés
2 -
Evaluation
0%
Type de contenu
Profils
Forums
Calendrier
Téléchargements
Blogs
Galerie
Messages posté(e)s par nikoo
-
-
Hello, j'ai les taraudages de quelques unes des petites vis du deck qui sont mort. Avec quoi je peux réparer ça proprement ?
J'ai regardé vite fait pour des inserts sur amazon mais j'ai pas trouvé pour du M4 ( c'est bien du M4 les vis du deck ?)
sinon 5000 bornes au compteur ça roule toujours aussi fort
 . Un morceau de jante en moins sur la roue arrière suite à un gros nid de poule mais bon ça tiens en attendant un moteur neuf.
. Un morceau de jante en moins sur la roue arrière suite à un gros nid de poule mais bon ça tiens en attendant un moteur neuf.

-
 2
2
-
-
il y a 7 minutes, Dridjo a dit :
Donc, pour vous, une Dultron à 85km/h est plus stable qu'une 250 cc... Ok. Si vous le dites.
Plus stable non, plus maniable oui si tu es debout dessus.
Et ne pas oublier que sur une trott debout on voit beaucoup plus de choses qu'assis sur un scoot !
J'ai testé une fois une Ultra avec un siege, pour les sensations c'était réussit, mais alors pour le coup j'ai trouvé ça dangereux car j'avais l'impression d’être très bas et de ne pas voir correctement autour de moi.
Pour te donner un exemple de stabilité à la vitesse maxi il m'arrive parfois de me poser un genou sur le deck et de me baisser la tête sous le guidon histoire de faire moins de prise au vent, ce genre de manip serait impossible si l'engin n'était pas stable. Mais je comprends complètement que ça affole les gens qui pensent qu'on est en train de faire l'équilibriste sur une planche de skateboard alors que non c'est stable, mais la ou c'est bien plus dangereux c'est en cas d'imprevu, si tu dois piler sec tu va partir rapidement sur la roue avant et la c'est plus dangereux qu'un scoot je suis d'accord.
-
 1
1
-
 1
1
-
-
il y a 44 minutes, Dridjo a dit :
C'est n'importe quoi...
Le centre de gravité en trottinette est fait par l'utilisateur, donc il est beaucoup plus instable car soumis au moindre sursaut ou faux mouvement, en plus d'être, en réalité, plus haut que sur un scooter. Prenez une 125, avec le poids, c'est l'engin qui fait presque tout le centre de gravité qui est donc plus bas et surtout moins soumis aux réactions du pilote.
Et ne parlons même pas de la circonférence des roues de scooters qui n'ont seulement participe à la suspension et donc la stabilité globale mais surtout absorbe beaucoup plus les imperfections de la chaussée. Imaginez un Petit nid de poule sur la chaussée à 80km/h. Non seulement la trott , avec ses roues 11 pouces max, s'envole, mais en plus l'engin absolument pas maniable (comparé même au plus médiocre des scooter) ne lui permettra pas de zig-zaguer.
Bref.
Tous ceux qui comparent aux scooters ou veulent faire des parallèles devraient déjà aimer un peu la physique
on voit que tu n'as jamais conduit une DTU pour sortir des trucs pareils.
La seule chose que tu dis qui est vraie est le cas ou on se prends un nid de poule, et encore le problème ne vient pas de la taille de la roue mais de la suspension des dualtrons qui est réglée beaucoup trop dure. Pour le reste c'est extrêmement maniable bien plus que n'importe quel 50, quand on a pris l'habitude, et c'est en partie grâce aux petites roues et du poids qui est dans les roues grâce aux moteurs.
C'est un engin très léger qui lorsque on a upgradé les freins freine presque aussi bien qu'une moto quand il s'agit d'un freinage "anticipé" . Pareil pour la stabilité c'est très stable également si la trott est bien réglée au niveau de la dureté de la direction.
Des nids de poule je m'en suis pris à plus de 50km/h ça m'a surpris mais je n'ai pas été déséquilibré au point de me mettre en danger pour autant ...
-
2
-
1
-
-
C'est un autre monde le pays des Dualtron ^^ je t'ai dis.
Quand on y a goûté on peux plus faire machine arrière
.
50 t'y es allé mollo avec ton gabarit tu peux prendre 65 km/h compteur tranquille

")
En tous cas ravis que tu sois heureux de ta nouvelle trott !!
-
1
-
-
merci @naikikoul Voila voila donc on peux fermer le topic, la trott est vendue
")
Petit détail que j'ai oublié de te dire pour recharger, il faut d'abord brancher le chargeur sur le secteur puis ensuite connecter le chargeur sur la trott, ça evite le differentiel de tension entre un chargeur à 0v et une batterie à 60v qui n'est pas bon à la longue. ( on entends un "chklaaak" quand on branche le chargeur dans ce cas )
Longue route à toi et à cette dualtron tu va voir c'est un autre monde dans la pays des trotinettes
-
à l’instant, Jaypharrell a dit :
Content pour toi, tant pis pour moi, je me rabattrai sur une dt3 ?
Oui enfin elle est pas vendu encore ça j'aurais la réponse dimanche aprèm
Faut pas vendre la peau de l'ours mais bon je pense qu'en effet elle à de grandes chances de partir dimanche.
-
il y a 15 minutes, Dreadnought a dit :
Faut avouer qu’elle est magnifique! ?
Oui elle est propre elle à servi de novembre à début janvier et à fait 2 3 sorties ensuite donc forcément elle a très peu roulée.
-
oui évidement
facture de 2490€ chez Rooelec.
Mais bon a priori elle est vendue la belle quelqu'un vient la récupérer Dimanche
-
1
-
-
Bonjour à tous.
Je me sépare de ma "petite" Dualtron,
Donc c'est une Dualtron 2 EX, achetée en Novembre 2017 dans une boutique parisienne.
C'est une V2 avec lcd bleu.
Elle a 1000 kil au compteur et n'a été utilisée vraiment que pendant 2 mois ( je suis passé rapidement sur une dualtron Ultra ).
Elle est entièrement d'origine et en excellent état.
Poids 28 kgs.
Vitesse Maxi 65 km/h ( très proche des perfs d'une DT3 )
Autonomie de 30 à 60 kil suivant la conduite et la température extérieure.
Seront inclus dans la vente pneus et chambres à air de rechange ainsi qu'un grip de deck neuf et un guidon pliable xtasy.
Prix 1200€.
Disponible sur Paris, pas d'envoi.
Des photos viendrons rapidement.
-
1
-
-
il y a une heure, sonkenn a dit :
Oui @loph, déjà en Dualtron Ultra on ne me respecte pas, j’imagine mal comment les conducteurs vont réagir en voyant débarquer roues et trotts sur la route.
Je me suis fait serré et dépassé par la droite sur une voie de rabattement ce matin par un « vieux » qui considérait que je n’avais pas ma place, je roulais pourtant à l’allure d’un scooter à la vitesse autorisée. Evidement la circulation faisant, je me suis arrêté à côté de lui pour lui faire part de mon mécontentement, réponse : « vous vous comportez comme un enfant monsieur »... Je n’ai pas relevé que c’était la « trottinette » le problème mais plus sont comportement qui était dangereux, évidement ça n’a rien changé...
J’imagine bien ce type de comportement se reproduire de plus en plus souvent avec « tout le monde » sur la route...
Après avoir parcourus 5000km à Paris en heure de pointe c'est le problème, si on roule sagement en trott - sur la route - les gens te respectent pas ( disons que ça c'est tres tres dégradé depuis qu'il y a des trotinettes en freefloating) . Donc si tu roules à 30 c'est limite si faut pas rouler dans le caniveau. Perso c'est pour ça que je roule toujours fort et on me fou la paix
-
1
-
-
il y a une heure, RS1600 a dit :
Bonjour, j'ai parcouru des centaines de page, et je trouve que cette Ultra en jéte un max !!!
J'aimerai poser une question aux possesseurs de l'Ultra, avez vous des surchauffe au niveau de la batterie quand vous êtes en Dual pendant plusieurs km ?
J'ai une Speedtrott RS1600 65km/h maxi, 60km d'autonomie, mais j'essaye de trouver un moyen de refroidir l’intérieur du deck sans laisser passer l'eau bien sûr ..
Quand je sollicite trop les deux moteurs, le module qui protége me reduit le couple aux roue, je sens que j'ai pas toute la puissance, malgré que j'arrive a atteindre facilement 50km/h ... PS j'ai dû mettre du silicone dans les petits trous, pour pas laissé l'eau rentrer...
Je me demande ce qui risque d'arriver si je débranche de thermostat qui surprotège les batteries ... Risque de prendre feu ? Car j'ai l’impression qu'elle surprotège trop la batterie, même un peu trop à mon gout ... J'ai pensé à brancher un mini ventillo PC portable dedans... Maintenant j'en suis content, 2000km et RAS, un pur bonheur, j'aurai aimé avoir la ULTRA, mais je trouve déjà que les 24Kg de la mienne c'est beaucoup, appartement au 3em étages.
Bref, comment la Ultra fait pour préserver la batterie de la surchauffe ? Avez eu des moments où elle donnait moins de jus ?
PS ; Quand il fait frais, elle devient hyper nerveuse, a la moindre accélération, elle part comme une bombe, tellement que la roue avant patine sur plusieurs mettre et les bras tire fort...
Merci pour vos explications,

Sur l'ultra la batterie chauffe un peu mais rien de notable, c'est les controlleurs qui chauffent déjà beaucoup plus mais pour éviter la surchauffe il y a un échangeur thermique sous le deck.
-
Le 31/10/2018 à 23:37, sonkenn a dit :
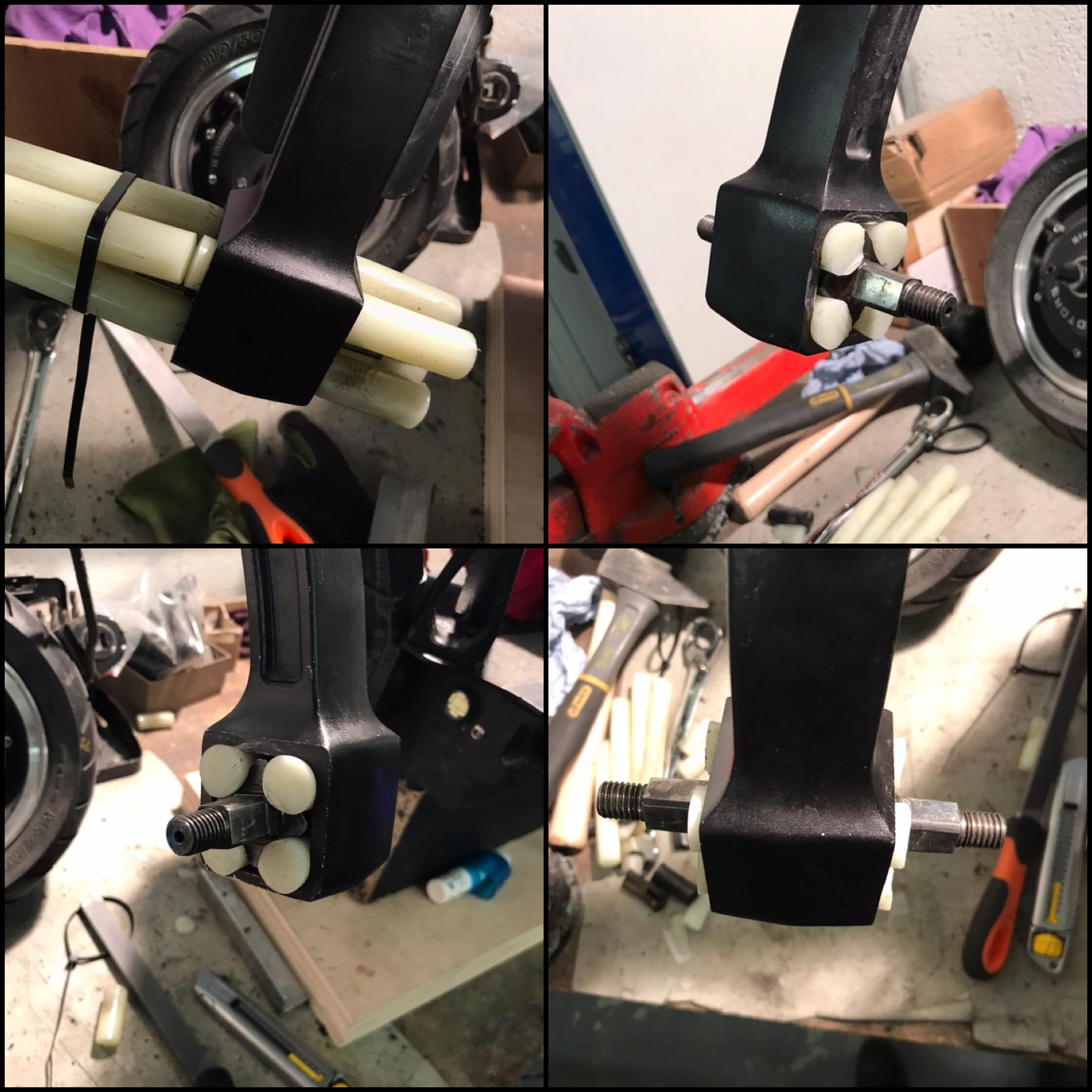
Hello tous, particulièrement @doutoune et @nikoo, ça y est je me suis fait ça hier soir!
Plié en moins de 2h30 tout compris, en comptant une modif de mon tube qui n’a servi à rien, et un biseautage des rods qui n’a servi à rien également. En fait mon tube fait juste la taille du carré de suspat et je peux le mettre dans l’axe, pas besoin de le mettre en biais comme « le russe », et les rods rentrent dedans.
J’ai laissé le moteur branché, et sur son bras, mais j’avais enlevé l’étrier pour ne pas abîmer la durite.

prêt.

l’arme du crime.
un tube carré (j’éditerai pour les côtes), une tige filetée M12 environ 40 cm, 1 manchon M12, 2 « écrous larges » (on dit aussi manchon) M12, 2 grosses rondelles plus grandes que le tube, et j’ai même mis un roulement de butée entre la rondelle et l’écrou poir faciliter la rotation de celui-ci. Très efficace.

dépose des anciennes barres, après les avoir percée poir que ce soit plus facile (là aussi, vu l’équipement je pense que c’était pas nécessaire et qu’on peut sauter l’étape). Rien de spécial, tige filetée et manchon sur le carré, le tube la rondelle le roulement l’écrou la clé de 19 et on tourne! Ça sort tout seul.

pose des nouvelles barres. je pensais couper les barres « à l’économie » pour en garder des morceaux pour l’arrière, finalement je ne voulais pas me planter je les ai juste coupées en 2. Vu la première photo, je ne pense pas qu’on puisse économiser avant le montage, mais récupérer des bouts après la coupe éventuellement. Je n’y pense que maintenant, je n’ai pas mesuré mes « restes », ni la taille nécessaire pour l’arrière.
Vous voyez que mon tube est pile de la bonne taille pour le poser « parallèle » et les rods - pardon les barres - rentrent dedans sans problème. Je me suis imprimé des guides en plastique pour faciliter la mise en place du tube sur la tige filetée, après pendant la manœuvre ça ne sert à rien.
Il s’agit donc de positionner les barres avec le bloc carré au milieu, une rondelle et un écrou derrière pour tirer l’ensemble. Un tirap pour que les rods ne s’écartent pas trop. La tige filetée de l’autre côté, fixée avec le manchon fileté, tube, rondelle, roulement, écrou, clé de 19 et on tourne!! Ça rentre tout seul. Au début je me suis dit « oh la la les rods elle prennent cher » mais c’est rien par rapport à ce qu’elles encaissent à l’usage. Le roulement est un vrai plus, dans la cidéo du Russe on le voit un peu galèrer à tourner, en plus avec une clé plate (j’avais une oeil à cliquet ?!) auxun souci pour moi, du beurre.
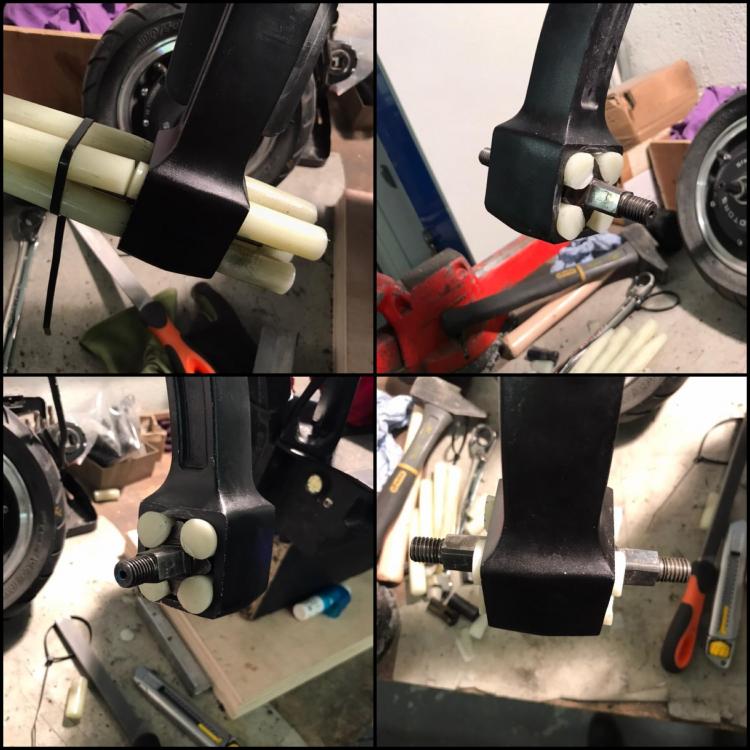
une fois les rods (bah oui j’y arrive pas, les barres...) et le carré bien à leur place, yapluka couper! J’ai laissé 4/5mm dépasser, car comme on l’a vu, en coupant à raz la suspension est plus souple, et vu que j’ai choisi les rods les plus molles je voulais contrebalancer. Merci @Dreadnought pour les bons conseils!

et hop on remonte tout et on fait le test dit « du chinois » ?
Merci @Trotti Phil également, sans qui rien de tout ça ne serait possible.. !! ?
Super boulot @sonkenn
 , il faut vraiment que je change mes rods a l'avant. Maintenant que tu as l'outil parfait ça devrait être facile :)))
, il faut vraiment que je change mes rods a l'avant. Maintenant que tu as l'outil parfait ça devrait être facile :)))
-
4
-
-
Il y a 20 heures, HTR a dit :
Sur motor sensorless en tout cas il y a pas de "smart" controlleur donc oui, le controlleur se fout de quel moteur est connecte. Dans les construcitons DIY velo / moto avec des hub motors puissants, personne n'achete un kit moteur - controlleur mais ils les prennent separement en fonction de ce qu'ils veulent ... et c'est interchangeable. J'ai lu plusieurs personnes sur endless-sphere qui depanne un pack 60V avec un controlleur 48v et il n'y a pas de problemes a condition d'avoir un BMS adequat et eviter que la batterie ne se decharge trop. Apres le micro code c'est la configurabilite de ton controlleur, les parametres "P" que tu regles a travers le LCD.
C'est pas le meme prix bien sur mais tu a la gamme "adaptto" http://adaptto.com/Products/Controllers/ qui est entierement programable sans PC/Smartphone et la tu peut jouer avec toutes les options et trouver ce qui marche le mieux pour toi. Une des carateristiques interessantes est qu'il y a une fonction anti-patinage pour maximum grip sur neige, sable et feuilles (video sur le lien)
Je viens de regarder le shema et c'est de toute evidence un peu moins plug and play mais c'est le modele que certaines boites dans l'ebike dans la stade R&D pour trouver les modes qui marche le mieux et apres comender des trucs standards comme on a sur les trotts avec les parametres en question. C;est aussi celui que LunaCycle a utiliser pour leur apocalypse prototype y compris leur modele 96v / 10,000 watts ... https://electric-boarding.com/2017/03/21/over-the-top-custom-luna-apocalypse-2wd-100000w-96v-50mph-electric-racing-kick-scooter/. Mais bon, c'est el double du prix et tout un investisement de temps pour maitriser l'affaire.
Ah oui ça à l'air d’être du lourd la. Dommage que le tarif soit si élevé surtout qu'il faut deux contrôleurs. Et je n'ai pas vu de site ou ces produits étaient dispo.
Les stats sont démoniaques en tout cas 65A pour le controlleur en version mini, l'équivalent de ceux qui équipent nos dtu à 40A.
-
Il y a 7 heures, shivas a dit :
En principe oui mais le contrôleur et gérer par un micro code
donc une variable qui change et c'est mort après il existe des contrôleurs open source
mais la on rentre dans un domaine qui va faire fumé les neurones

En partant du fait que les moteurs '"seraient" identiques les contrôleurs ne devraient en théorie n'y voir que du feu. Vu qu'il n'y a aucun capteur et électronique qui communique . Mais bon aucune certitude que ça fonctionne
Sinon pour faire 150km avec une ultra sur une batterie c'est peu être jouable si tu pèse 50 kgs que tu es sur une selle que tu fais 1m30 qu'il fait 30° que c'est plat pas de vent que tu mets tout au mini ( donc 25km/h maxi ) ça peu s"envisager. ça commence à faire beaucoup de conditions
-
1
-
-
il y a 18 minutes, HTR a dit :
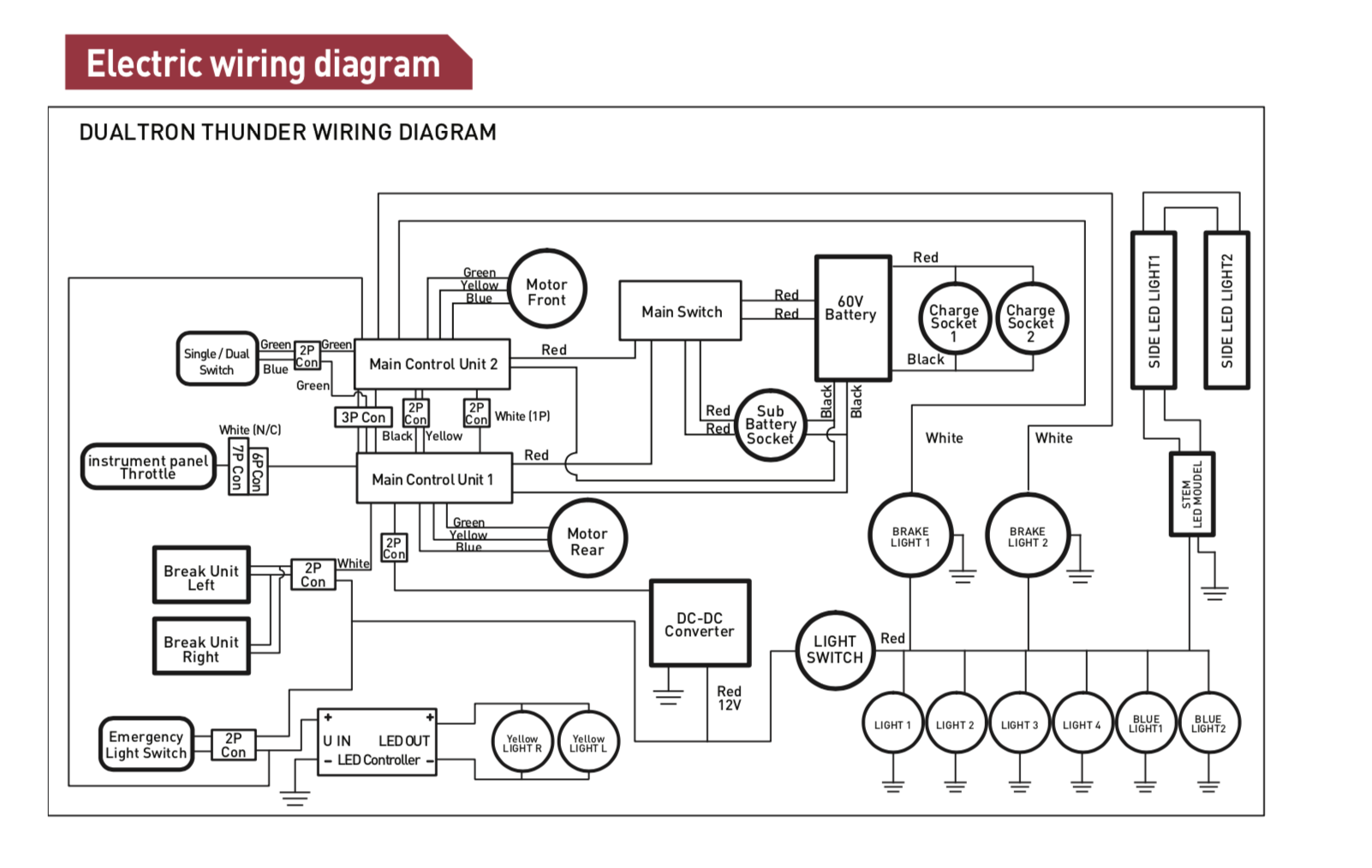
Le schema electrique est dispo dans le manual ... une copie ecran de la page ...
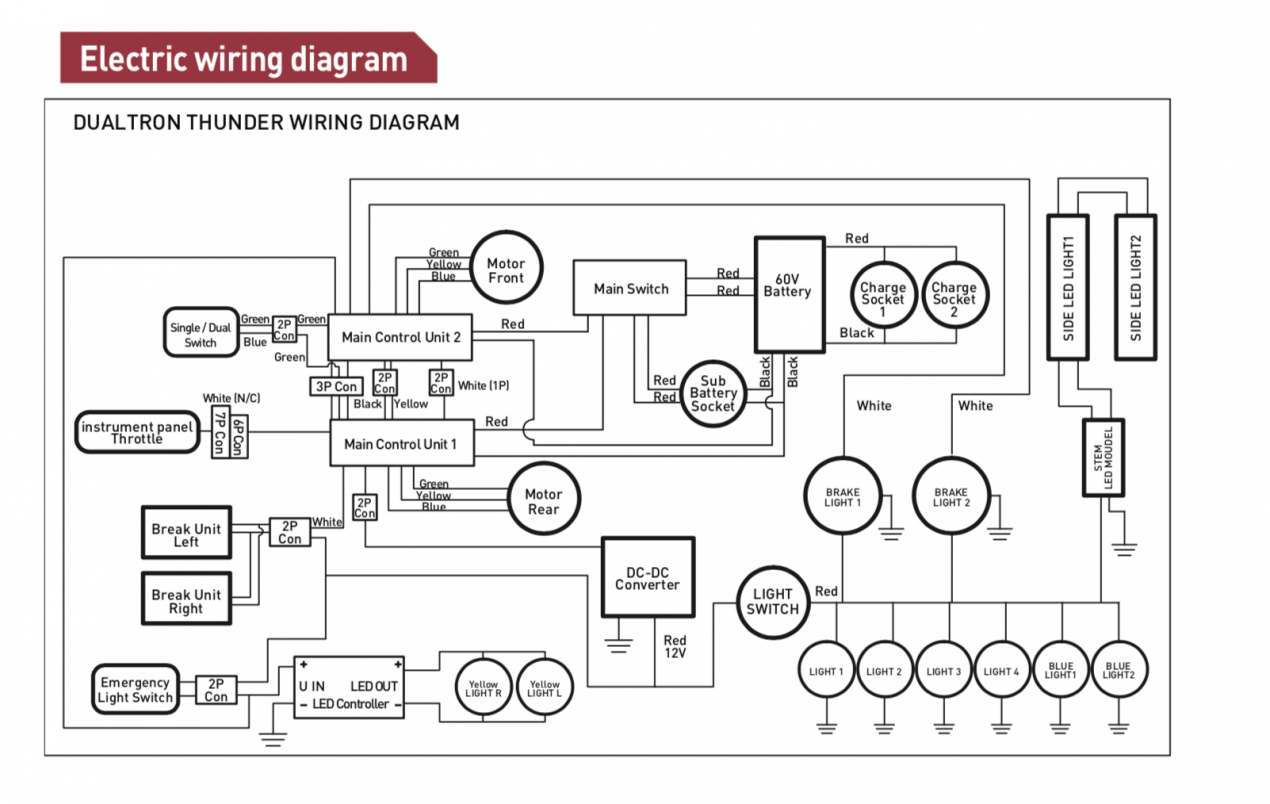 Sinon tu trouves tous les manuals sous el fil "Notices et Schémas gamme MINIMOTORS" @sonkenn
Sinon tu trouves tous les manuals sous el fil "Notices et Schémas gamme MINIMOTORS" @sonkenn
Merci, c'est vraiment exactement comme sur une DTU.
Je posais ces questions car je plus ça va plus je me dis qu'il est possible d'upgrader une DTU v2 vers Thunder à moindre coût ( environ 350€) en changeant uniquement les controlleurs et le lcd.
Cependant cette opération ne serait viable que si les moteurs sont compatibles. Le but étant de se débarrasser de ce qui semble est un bug de controlleur qui affecte de nombreuses dtu v2 à savoir la trott qui se mets à hésiter à l'accélération quand on arrive à 78km/h.
Pour dépasser cette vitesse il faut d'une manière ou d'une autre réduire l'effort que doit fournir la trott pour passer 80km/h ( se baisser pour réduire la résistance au vent, ou prendre une légère descente par exemple) ensuite comme par magie ça continue d'accélérer jusqu'à 88-90 même sur le plat. Sinon bah on reste bloqué à 78km/h ce qui reste tout à fait acceptable
-
2
-
-
Salut les Thunderistes,
Est ce que l'un d'entre vous aurais quelques photos deck ouvert pour voir les connections des contrôleurs, le top serait un schéma électrique.
Sur les Ultra il y avait un schéma par exemple dans la doc de la trott.
Au niveau du 12v est ce que c'est comme sur les autres dualtrons ? , il y a un convertisseur de tension 60v => 12v ?
Autre question, concernant les moteurs : combien de paires de pôles ont ils ? 16 comme sur les DTU v2 ?
-
1
-
-
Il y a 2 heures, JJK a dit :
on aurait donc la une explication.....une légère "faiblesse" des contrôleurs de DTU .
Oui c'est ce qui me semble le plus plausible ! Problème sur les composants ou un defaut de programmation du controlleur.
Dommage qu'il n'y ai pas de boite qui se soit lancé dans des controlleurs upgradés pour les dualtron ultra, j'ai essayé de chercher un peu mais e n'ai rien trouvé.
Je me posais la question si c'était possible de monter des controlleurs de thunder avec le lcd qui va avec sur nos ultra. Puisque c'est le même voltage batterie les même moteurs ... enfin a voir pour les moteurs ! il faut le même nombre de paires de poles je pense ( on est à 16 sur les moteurs d'ultra). L'encombrement des controlleurs de thunder semble identique à ceux de l'ultra donc ça doit rentrer proprement dans le deck a priori
-
2
-
-
il y a 51 minutes, Alien a dit :
Merci nikoo ,c est en en gros ce que je voulais dire a @Didier.94600 suite a ca reponce ?
sinon je suis tombé la dessus
ça m'a semblé fort intéressant
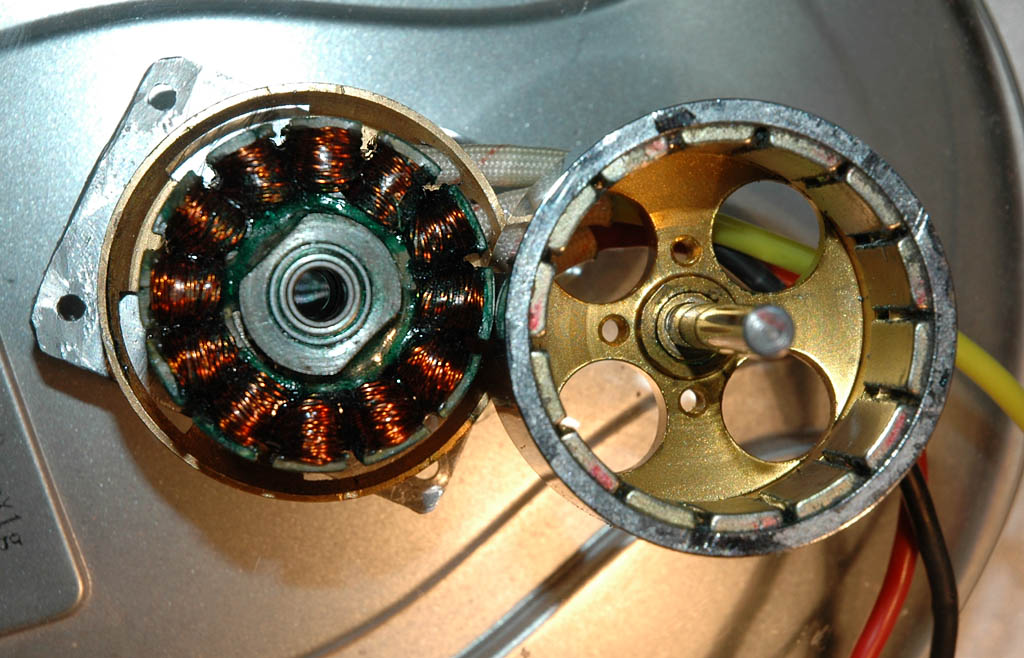
Comment ça marche ?Cage tournante ou rotor interne, un moteur brushless est toujours constitué d'électro-aimants (bobines) fixes et d'aimants en rotation. Quand un aimant approche d'une bobine, le contrôleur la magnétise, ce qui attire l'aimant et fait accélérer le moteur. Dès que l'aimant est assez proche de la bobine, le contrôleur la désactive. L'aimant la dépasse sur sa lancée pour être attiré par la bobine suivante qui est alors activée, et ainsi de suite. Mais comment "sait" le contrôleur quand il doit alimenter ou couper la bobine ?
 Pendant la période "désactivée" de la bobine, le mouvement de l'aimant induit un courant dans les fils de cuivre, comme une dynamo de vélo. Le contrôleur mesure ce courant des milliers de fois par seconde, ce qui lui permet de «savoir» à quelle "distance" se trouve l'aimant. Quand l'angle entre aimant et bobine correspond au «timing» programmé, le contrôleur active la bobine.
Pendant la période "désactivée" de la bobine, le mouvement de l'aimant induit un courant dans les fils de cuivre, comme une dynamo de vélo. Le contrôleur mesure ce courant des milliers de fois par seconde, ce qui lui permet de «savoir» à quelle "distance" se trouve l'aimant. Quand l'angle entre aimant et bobine correspond au «timing» programmé, le contrôleur active la bobine.
Pour que cela marche, il faut qu'il y ait un mouvement entre les bobines et les aimants. Au démarrage, le contrôleur va donc alimenter brièvement les bobines, juste pour lancer le moteur. Dès qu'il "perçoit" le mouvement, il peut synchroniser son pilotage, et inverser la rotation si nécessaire. C'est la raison pour laquelle certains moteurs semblent "hésiter" au démarrage.
Pour changer le régime d'un brushless, le contrôleur pilote la vitesse de rotation du champ magnétique dans le moteur et la durée d'activation des bobines. Les moteurs les plus simples ont trois bobines et deux aimants, mais les plus complexes ont 16 pôles, voire plus encore ! Un tel moteur tournant à 20.000 t/mn (dans une turbine par exemple) voit ses bobines s'allumer et s'éteindre des milliers de fois par seconde. Pendant chaque période "éteinte", le contrôleur doit avoir le temps de faire assez de mesures pour déterminer la position des aimants. S'il ne parvient pas à suivre (le PWM est trop bas), le moteur surchauffe, "cogne", vibre, émet des bruits inquiétants et peut même s'arrêter brutalement. Un peu comme un moteur thermique quand l'allumage se fait au mauvais moment...http://www.jivaro-models.org/controleurs_brushless/page_controleurs_brushless.htm
-
 5
5
-
-
Les moteurs sur nos trott sont des Brushless, donc avec 3 phases.
Le fil jaune ne sert pas au frein electro, si on coupe un fil ça déséquilibre le champ magnétique du moteur, et c'est pour ça qu'il se met à "freiner". Mais les 3 fils passent le même courant avec un déphasage, tapez moteur brushless sur le net vous allez tomber en 2 sec sur le principe de fonctionnement. D'ailleurs c'est pour ça que si on inverse deux fils le moteur se mets à tourner en sens inverse.
-
1
-
-
Il y a 2 heures, Aurel75 a dit :
Salut,
Petite astuce, pour "décoller" la jante, il faut gonfler le pneu et elle partira d'elle même. C'est certes un peu paradoxal avec une crevaison mais si elle est légère ça fonctionne bien.
c'est ce qui fonctionne le mieux.
Si c'est impossible de regonfler la chambre à air et que ça ne vient pas du tout, il faudra aussi mettre un peu de dégrippant, à la jonction des deux parties de la jante.
-
tu es sur de pouvoir mesurer le courant sur le cable moteur avec une pince ampérométrique ? car dans le cas de nos moteurs il y a 3 fils et le courant est découpé d'une manière particulière pour les moteurs brushless.
A la limite pour la chute de tension on peux laisser brancher un charge doctor sur la prise de charge (qui va donner une lecture directe de la tension aux bornes du bms je pense).
Au lcd c'est difficile de voir, il y a de l’inertie entre la tension aux bornes réelle et celle affichée au lcd ( pratiquement 10secondes avant que ça se stabilise). Je l'ai constaté quand j'avais testé un branchement de batterie externe sur le switch principal. J'avais une batterie à 90% et l'autre à 55% et bien quand je switchais de l'une à l'autre la tension au lcd mettais 10 bonnes secondes avant de se stabiliser.
Faudrait que je revérifie mais de mémoire j'avais quand même tenté une lecture sur le lcd, et il m'a semblé que la tension remontait légérement une fois arrivé au point de bloquage à 77km/h . Par exemple tension à vide => 66 v / en accélération 60v / arrivé au point de bloquage remonte à 61v puis remonte à 66v au lâcher des gaz.
-
2
-
-
Le 21/10/2018 à 15:39, JJK a dit :
ça pourrait être une piste... puisque Nikoo, a deja tout changé sauf les cables et l'inter general, et cette inter est vraiment de mauvaise qualité, avec une surface de contact peur être trop faible pour laisser passer l'intensité requise quand on est plein gaz sur les deux moteurs d'une Ultra.
c'est une hypothèse...
Après , je ne vois qu'un problème de conception du contrôleur puisqu'on retrouve ce problème sur toutes les Ultras, difficile d'incriminer des batteries neuves à moins qu'elles ne soient à la limite de l'intensité demandé quand la Ultra est à donf...

sisi l'inter général aussi, c'est le premier truc que j'ai viré
. Et tous mes connecteurs de puissance sont en XT150 .... moteurs / controlleurs et batterie / controlleurs
-
il y a 4 minutes, Quegorosoit a dit :
Peut-être que la trottinette calcul qu'au dessus de cette vitesse vous ne pourrez pas utiliser le frein électromagnétique car il rechargera trop la trot lol.
j'ai testé aussi sans le frein electro. C'est pareil.
-
il y a 48 minutes, Phil a dit :
Ah ok, et bien , on peut dire que si tu as fait 3000 kms sans ce problème c'est que ce n'est pas systématique ! Sur la mienne ça l'a fait presque dès les premiers tours de roue je pense.
J'ai pas pris la vitesse max pendant les premiers kilomètres. Moi je le ressens plutôt sur la roue AR, d'ailleurs au début je pensais que c'était le garde boue qui tapotait le pneu mais au final je pense que ça se ressent aussi bien sur l'avant que l'arrière.
Aussi j'ai remarqué que plus la batterie est chargée plus le grougroutage sera difficile "à passer". Par exemple si j'ai la batterie à 100% je vais bloquer franchement à 77-78km/h et alors si je baisse la puissance dans le lcd ( je sais plus quel Pxx) je passe de 100 à 80% bah je vais avoir un léger choucroutage à 77-78 puis ça va monter à 82-83km/h alors que la trott est bridée au lcd à 80% de sa puissance ...
Mais bon j'ai changé controlleurs / inversé les moteurs / testé et intervertis avec un moteur en plus / viré toute la partie 12v / viré le switch / changé le lcd, le cable et même ... la batterie (non non je suis pas maso
 )
)
Mais c'est clair c'est un peu frustrant, car que j'ai la batterie à 100% ou à 60% je prends la même vitesse maxi.
-
 1
1
-




Dualtron 2 ultra
dans MiniMotors
Posté(e) · Modifié par nikoo
Merchi didier !")
Je vais faire ça, bonne idée le coup de les mettre par en dessous pour les fixations exterieures du deck !!