



Classement
-
GT999
Membre9Points16Compteur de contenus -

Canaille
Membre8Points2312Compteur de contenus -

Exo
Membre5Points3319Compteur de contenus -

Centurion63
Membre4Points1475Compteur de contenus




Contenu populaire
Affichage du contenu avec la meilleure réputation le 10/15/21 dans toutes les zones
-
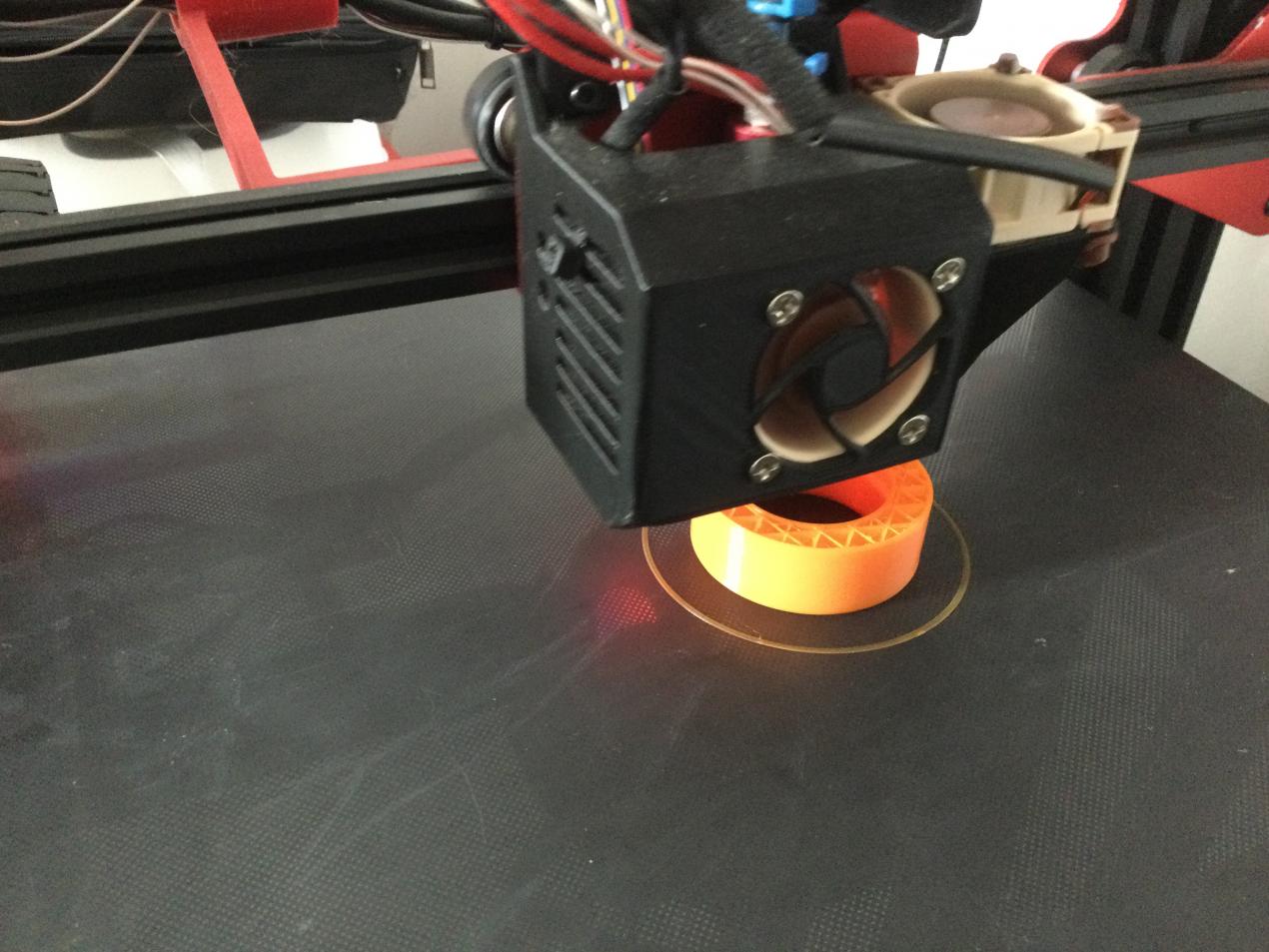
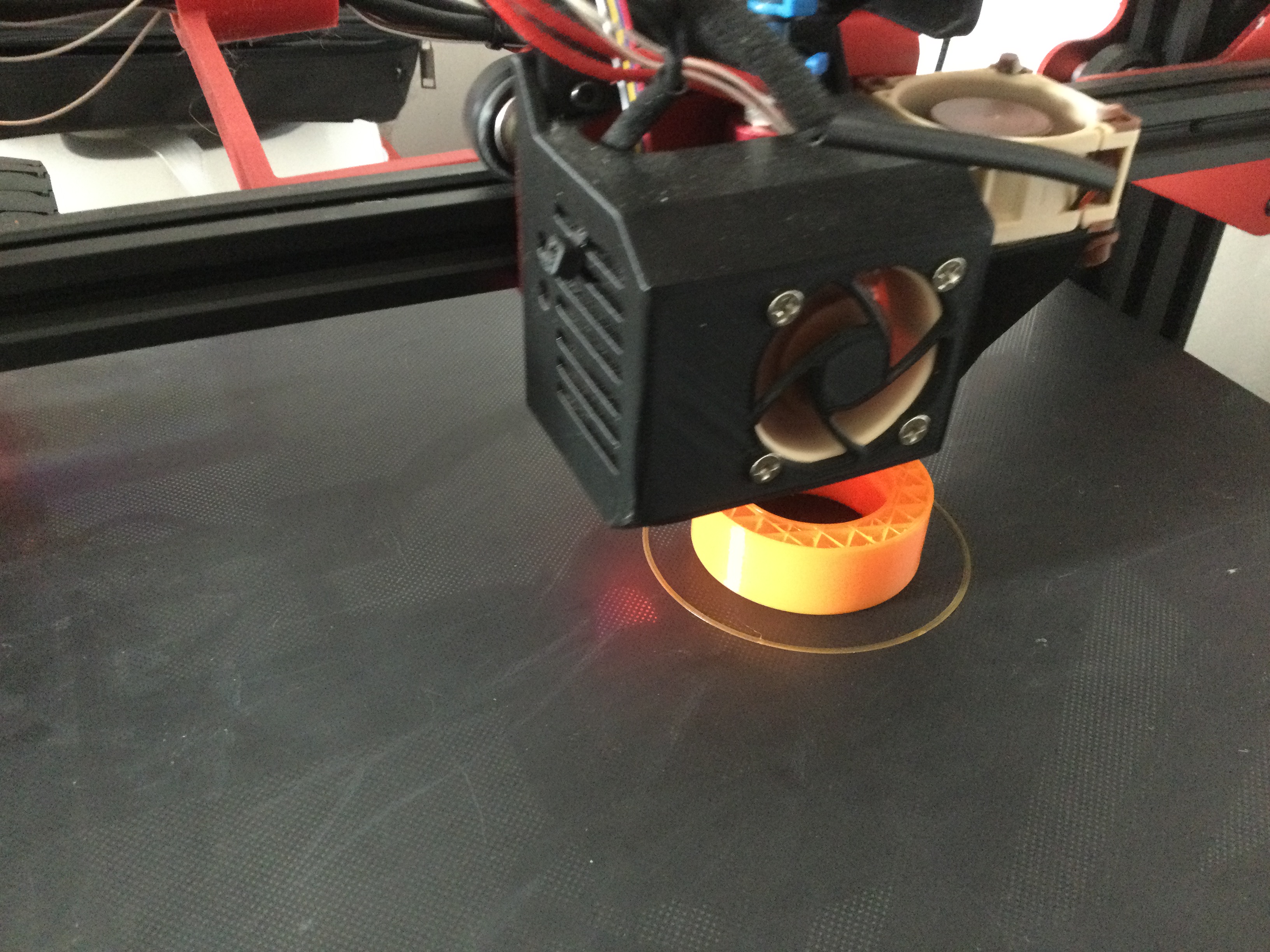
3 pointsBon voici ce que sa donne âpre trois modifications fichiers je l ai arrêté avant pour vérifier et la la classe donc j envoi les impressions complètement voici ce que sa donne et le fil de recharge est ranger dans le pade


 3 points
3 points -
3 pointsAlors sur le trajet ce matin j'ai demandé à un gendarme pour les lumières bleues, "on s'en fout vous êtes pas une voiture. Vous mettez bien un casque alors que c'est pas obligatoire". (échange surréaliste. J'ai la conv sur la dashcam mais je ne sais pas flouter. Ils sont là pour sécuriser les procès Bataclan sur l'Ile de la Cité, pas forcément spécialistes de la législation routière) 500 mètres plus loin, la police arrêtait des vélos, nouvelle demande. "Ce n'est pas interdit au sens strict mais fortement déconseillé, et c'est pareil pour le rouge (j'étais surpris). Fixe pas de problème, clignotant c'est moyen, gyroscopique, c'est chercher les ennuis (gentiment hein ils étaient sympas). Idéalement il faudrait du vert, qui n'est utilisé par personne, ni inter, ni chantier"3 points
-
3 pointsElle est très grande et massive parce que Jack est pas très grand... Concernant le poids, le prototype était bien à 35 kg, donc il faut arrêter de croire aux 28 kg (comme aux 250 Km d'autonomie sur les fiches techniques) , la 28 en fait 25, il faut rajouter le supplément des batteries (on en a parlé, 6 kg), un moteur plus grand plus lourd, des pads, la béquille, l'amortisseur plus grand, toutes des petites choses qui font qu'en dessous de 33kg ça va être très compliqué. Pour avoir essayé une shermann, c'est chaud à tourner en haute vitesse. Ca fera beaucoup pour la roue pour chercher son pain par exemple (j'crois qu'une 16S va rentrer dans le garage prochainement ou une S16) Ce qui m'inquiète c'est la maniabilité d'un monstre de 35 kg dans de la boue, ou autres terrains de jeu (on rappelle que c'est un peu le but quoi). Bref j'ai jamais été aussi impatient de tester une roue, je confirme aussi être assez inquiet du départ de Jack juste avant la sortie définitive du modèle même si je fais confiance à ks pour sortir un truc bien ficelé...3 points
-
2 pointsLa "Cormojauge", pour l'instant installée sur KS-S18 Elle affiche successivement la tension de la batterie, les kilomètres restants et le pourcentage batterie Les essais en situation réelle vont commencer sous peu. Si ça donne satisfaction une version pour Tesla devrait suivre.



 2 points
2 points -
2 pointsBonjour à tous, titre de post un peu racoleur pour présenter une babiole reçue ce jour, et dont @Bonheur sur Seine a vanté les mérites dans une de ses vidéos. Ce petit dispositif est destiné à être vue plutôt qu'à éclairer, c'est assez important de le préciser. j'ai balancé un paquet de photos à la fin, je n'ai pas réussi à les placer au fil du post, avec les commentaires correspondant à chaque vue, il va donc falloir faire avec. Cette petite machine tient en place grâce à un aimant fourni, et il existe une gamme de supports différents. Pour ma part j'ai également pris un support pour cintre de vélo. L'aimant est très puissant, et bien qu'il existe un support dédié pour les casques, celui fournit trouve bonne place sur la visière sans l'alourdir de façon conséquente (180 gr ). Une fois en place, j'ai pris le casque en main et l'ai secoué brutalement. La machine a à peine broncher sur son axe. Je pense que dans le cadre d'un usage normal, et ne devrait pas broncher. le réglage de l'intensité et du mode d'éclairage (fixe, discontinu, façon K2000, façon gyrophare) permet de varier les plaisirs et de se faire remarquer, ce qui est bien le but premier. la petite taille est surprenante, mais les diodes sont puissantes et l'ensemble de fort bonne qualité( le bouzin est étanche et prétendument incassable). La charge se fait via un cable usb, et le seul bémol serait l'autonomie: 1h30, à mon avis en mode puissance maxi, d'après la vidéo de Raphael. A voir que cela donne à l'usage, mais cela pourrait fort bien convenir mes courtes virées nocturnes.








 2 points
2 points -
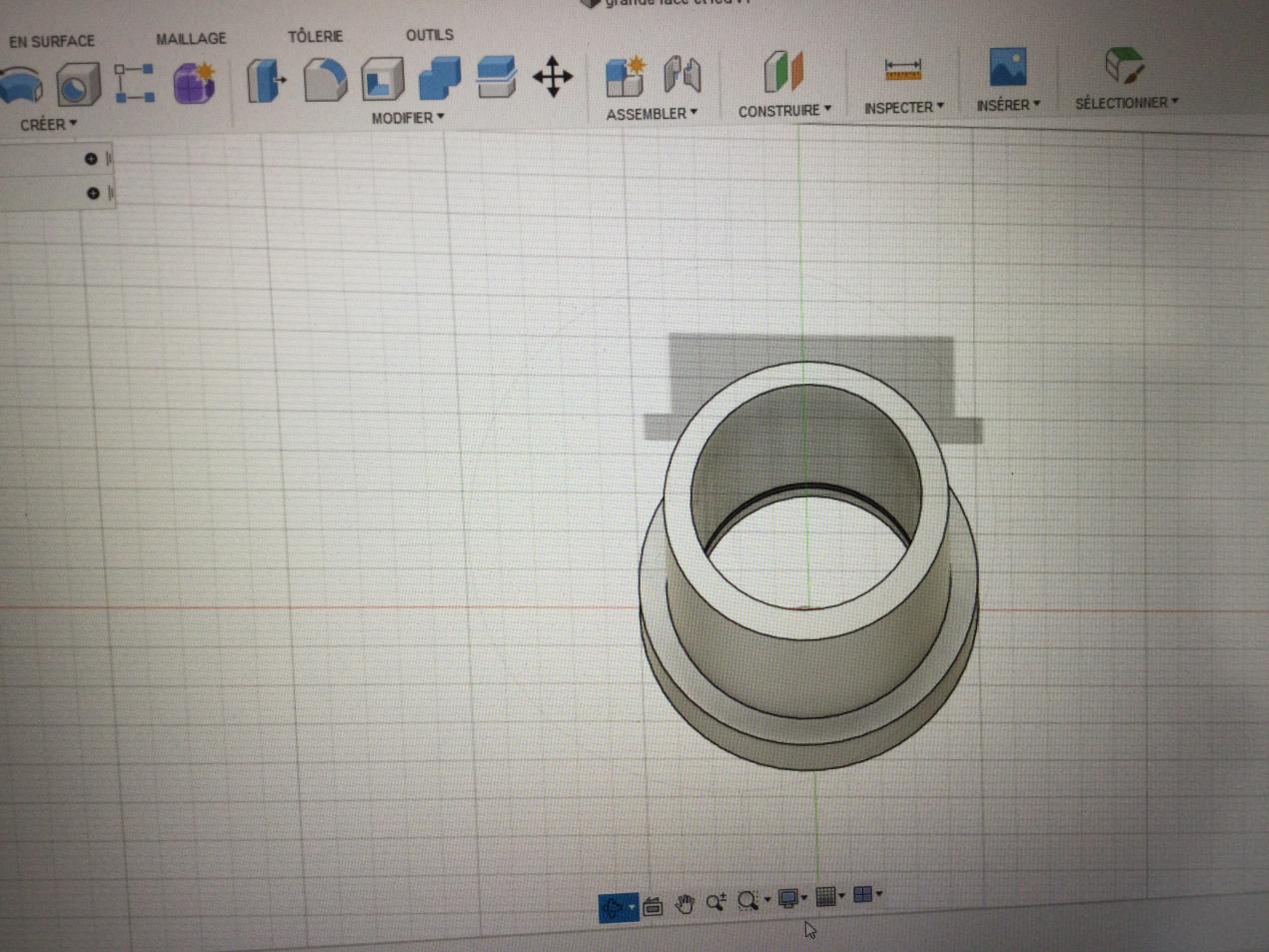
2 pointsHello amis Wheeler après un repos forcé je me sui remit à la modification de mes pades carbone fichier fait la sa imprime un essai pour voir si je doit modifier ou pas à suivre j ai traversé le support pour y loger le câble de charge
 2 points
2 points -
2 points
-
2 pointsBen non, la protection n'est pas garantie car le tb peut ne pas se déclencher. On dit souvent : le tb est un relèvement des pédales, et effectivement c'est un seuil relativement actif qui tend à limiter la vitesse, d'une part parce que cela perturbe le pilote, mais aussi que pour se "relever", les pédales pivotent vers l'avant ce qui génère un déséquilibre arrière qui stabilise ou fait ralentir. Bien sûr, les intrépides cramés du bulbe peuvent passer outre, à condition d'avoir les chevilles souples : MAIS : pour générer le tb la roue a besoin de ressources, pour accélérer fugitivement plus vite que son pilote afin de "redresser" les pédales. Si le moteur est à fond, il n'y aura pas de tb, c'est comme ça, Par contre il y a un joker : si on atteint la limite assez doucement (asymptote), on peut ressentir cette limite de couple qui provoque un tilt front = un basculement vers avant. Les bons essayeurs arrivent à ressentir cette limite. Cette progressivité vient du fait que le rotor du moteur brushless est asservi (sondes de hall), il n'y a pas de décrochage brutal comme la majorité des autres types... sauf que c'est quand même rapide, et souvent provoqué par un cahot. Donc c'est éventuellement rattrapable, ça m'est arrivé une fois, pas de chute mais une impression atroce. Bon rétablissement.
 2 points
2 points -
Le Bib c'est pas très grave , c'est comme quand tu sautes du 6éme étage , la déscente ça va , c'est l'atterrissage le plus compliqué2 points
-
2 pointsHaha ben justement j'ai papoté avec la police à un feu rouge, ils ne m'ont rien dit là dessus, j'étais en mode sapin de Noël (pas gyro mais strobo) alors je ne sais pas trop. Peut être le fait de ne pas (encore) être totalement considéré comme un véhicule ? Ce témoignage n'a aucune valeur légale évidemment, j'ai demandé une seule fois2 points
-
2 points2 pointsPour avoir déjà embrassé un scoot et un livreur de nuit (19h en hiver), je vous avoue que je suis un peu flippé de la visibilité. Je préfère ressembler à un gyrophare débile que d'être dans un camion qui en a un 😂2 points2 points#J'ai ces disques (road flare sur Amz pour une trentaine d'€ la paire, différents modèles et couleurs, gyro, flash fixe etc) couplés à des aimants 30kg dans le TSG et/ou sur la roue (aimants vissés sur la poignée alu du trolley pour ma part) Super efficace, voire mieux que le dispositif que j'ai déjà vu en fonctionnement pour moins cher. Il en existe des plus petits que je n'ai pas encore reçu pour les tester. Alors oui c'est un mix entre daft punk et princesse Leia mais ça fait terriblement le taf



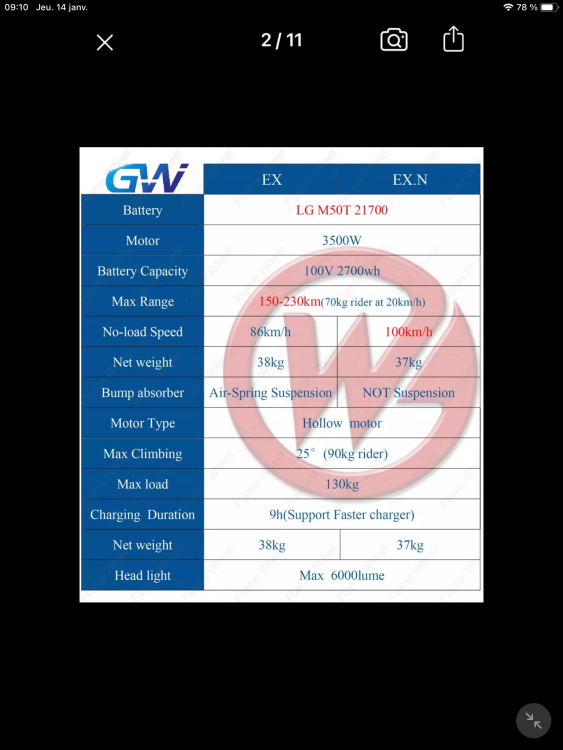
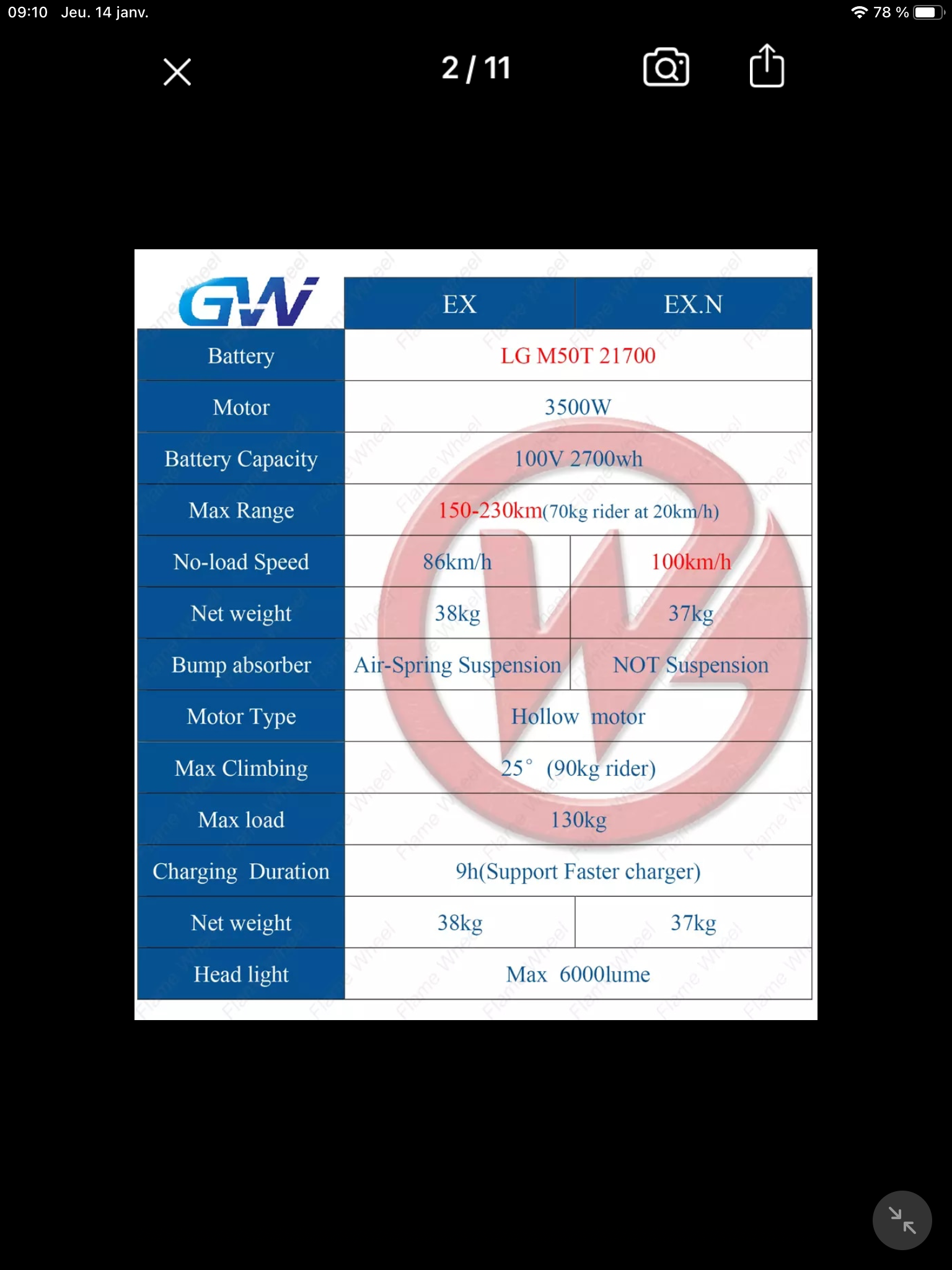
 2 pointsBonjour ami Wheeler et oui je me suis séparé de ma super MSP qui va continuer sa vie avec un nouveau maître très sympa qui va savoir la chouchouter et moi j ai commandé ma nouvelle roue une Gotway EX-N modèle sans suspension avec 2700 wh de batterie et un moteur de 3500 watts bon je doit attendre 45 jours mais bon entre déconfinement et reconfinement et ce temps de M......... sa va vite passer voici qu elque photos de la bête et une petite videos par contre je recherche une protection Néoprène sans succès et bien sur dés réception remplacement des pedales par des nids d abeilles et coussins
2 pointsBonjour ami Wheeler et oui je me suis séparé de ma super MSP qui va continuer sa vie avec un nouveau maître très sympa qui va savoir la chouchouter et moi j ai commandé ma nouvelle roue une Gotway EX-N modèle sans suspension avec 2700 wh de batterie et un moteur de 3500 watts bon je doit attendre 45 jours mais bon entre déconfinement et reconfinement et ce temps de M......... sa va vite passer voici qu elque photos de la bête et une petite videos par contre je recherche une protection Néoprène sans succès et bien sur dés réception remplacement des pedales par des nids d abeilles et coussins






 1 point1 pointTout nouveau sur ce forum que je viens de découvrir il y a pas moins de 10 min ! Totalement novice dans le milieu de la roue, j’ai très envie de m’y mettre et c’est donc pour cela que je m’inscris sur ce forum afin de me renseigner sur ce nouveau monde que je découvre !1 point1 point1 point@Emil121 , je trouve que tu résonnes bien en disant " c'est pour éviter que la coque ne tourne avec la réaction du couple moteur", le mot clé réaction est hautement pertinent. Pour rouler sur plat à 20 km/h, on consomme autour de 17 Wh/km, c'est à dire que le moteur reçoit ~90% de 340 Watts, ce qui représente un certain couple. Pour maintenir la vitesse constante, le pilote devra avoir son cdg un peu devant le point de contact au sol pour créer l'anti-couple. J'imagine que c'est un peu pareil sur les motos à vilebrequin longitudinal (la belle Guzzi V85 TT par exemple). Il y a le couple de renversement chaque fois qu'on titille les gaz, mais quand on roule, on est aussi un peu penché pour servir de point d'appui. Quant à l'horizontalité des pédales, c'est un peu variable. Il y a le gain en boucle ouverte de l'asservissement qui n'est pas infini, ce qui veut dire qu'il y a toujours un traînage, une imprécision qui peut aussi être accentuée volontairement pour servir de retour de commande. Ces traînages peuvent être fugitif,angulaires ou temporels, avec éventuellement du cross-axis (qui redresse les pédales quand on tourne), ce sont tous ces réglages qui donnent la personnalité algorithmique d'une roue. La mode est plutôt aux roue puissantes très raides, les tentatives d'aide au freinage de la Z10 n'ont pas trop de succès (c'est un retard fugitif de freinage moteur ce qui accentue le cabré des pédales, donc un genre de tilt back contextuel). C'est indispensable. Tout cela est tordu, et quand on croit avoir compris, on se met à avoir des doutes. Exemple : j'ai écrit à plusieurs reprises qu'une roue sans pilote garde sa vitesse tant qu'il y a du jus. Eh bien je n'en suis plus persuadé, Il me semble maintenant que la roue doit être légèrement déséquilibrée vers l'avant pour compenser les frottements de roulage, sinon elle ralentie, ou pas, mais si, euh, ... Bon, je vais me coucher. Edit : Dis donc, @Emil121 , tu as d'autres questions comme ça ? Parce que tu nous ruines les neurones
1 point1 pointTout nouveau sur ce forum que je viens de découvrir il y a pas moins de 10 min ! Totalement novice dans le milieu de la roue, j’ai très envie de m’y mettre et c’est donc pour cela que je m’inscris sur ce forum afin de me renseigner sur ce nouveau monde que je découvre !1 point1 point1 point@Emil121 , je trouve que tu résonnes bien en disant " c'est pour éviter que la coque ne tourne avec la réaction du couple moteur", le mot clé réaction est hautement pertinent. Pour rouler sur plat à 20 km/h, on consomme autour de 17 Wh/km, c'est à dire que le moteur reçoit ~90% de 340 Watts, ce qui représente un certain couple. Pour maintenir la vitesse constante, le pilote devra avoir son cdg un peu devant le point de contact au sol pour créer l'anti-couple. J'imagine que c'est un peu pareil sur les motos à vilebrequin longitudinal (la belle Guzzi V85 TT par exemple). Il y a le couple de renversement chaque fois qu'on titille les gaz, mais quand on roule, on est aussi un peu penché pour servir de point d'appui. Quant à l'horizontalité des pédales, c'est un peu variable. Il y a le gain en boucle ouverte de l'asservissement qui n'est pas infini, ce qui veut dire qu'il y a toujours un traînage, une imprécision qui peut aussi être accentuée volontairement pour servir de retour de commande. Ces traînages peuvent être fugitif,angulaires ou temporels, avec éventuellement du cross-axis (qui redresse les pédales quand on tourne), ce sont tous ces réglages qui donnent la personnalité algorithmique d'une roue. La mode est plutôt aux roue puissantes très raides, les tentatives d'aide au freinage de la Z10 n'ont pas trop de succès (c'est un retard fugitif de freinage moteur ce qui accentue le cabré des pédales, donc un genre de tilt back contextuel). C'est indispensable. Tout cela est tordu, et quand on croit avoir compris, on se met à avoir des doutes. Exemple : j'ai écrit à plusieurs reprises qu'une roue sans pilote garde sa vitesse tant qu'il y a du jus. Eh bien je n'en suis plus persuadé, Il me semble maintenant que la roue doit être légèrement déséquilibrée vers l'avant pour compenser les frottements de roulage, sinon elle ralentie, ou pas, mais si, euh, ... Bon, je vais me coucher. Edit : Dis donc, @Emil121 , tu as d'autres questions comme ça ? Parce que tu nous ruines les neurones 1 point1 point1 pointBonheur Sur Seine nous parle des NyloNové Ces pédales sont top et ces petits rajouts ergonomiques ont l’air vraiment top.1 point1 point1 pointPour les freins je ne peux pas te renseigner car je ne connais pas ! Pour les amortisseurs il y a @Lionel74 qui en parle, il pourrait te dire ce qu'il en pense ! https://www.espritroue.fr/topic/13207-amortisseurs-ks-a5rr1/?tab=comments#comment-253997 Pour le guidon assure toi que les câbles soit assez long !1 point1 pointet tout ca avec le sourire ultrabrite surtout vu le prix chez le dentiste 🤐1 point1 pointJ'ai vraiment eu les larmes aux yeux en regardant cette vidéo très émouvante ! 😭 Pour une fois que je pose un emoji qui pleure !1 pointIl n'y'a aucun soucis et tu n'a pas à te justifier surtout quand sa part d'un bon sentiment 😌 bonne Continuation ami Wheeler! 🤙1 point1 pointparfois les vendeurs chinois sont plus reactifs que les magasins francais en SAV et prise en charge , ils pensent q'un client satisfait reviendra acheter sur leurs sites. un detail qui a son importance surtout par rapport a la concurrence!1 point1 pointLa Nextorch ou tout produit de ce type est un bon complément afin de se faire voir en nocturne , ne pas négliger non plus les produits à base de bandes réflectives sur la roue ( obligatoires rouge sur l'arrière , blanc à l'avant ) très visible par nos amis ( ou pas ) automobilistes J'utilise souvent de nuit un produit assez exceptionnel en terme de visibilité aussi bien sur la roue qu'en moto ,très confortable ,très chaud avec une doublure thermo amovible avec protections full niveau deux (option) au look sympathique et Urbain ,la moindre lumière sur ce fameux blouson est intensifié et il devient presque impossible de passer inaperçu, une vraie ampoule sur patte , aussi un petit plus "by night " https://www.motoblouz.com/vente-blouson-bering-drift-high-visibility-170828.html1 point1 pointVoici une vidéo d'une V11 par exemple avec un point de vue un peu plus semblable: Vs No comment. 😉
1 point1 point1 pointBonheur Sur Seine nous parle des NyloNové Ces pédales sont top et ces petits rajouts ergonomiques ont l’air vraiment top.1 point1 point1 pointPour les freins je ne peux pas te renseigner car je ne connais pas ! Pour les amortisseurs il y a @Lionel74 qui en parle, il pourrait te dire ce qu'il en pense ! https://www.espritroue.fr/topic/13207-amortisseurs-ks-a5rr1/?tab=comments#comment-253997 Pour le guidon assure toi que les câbles soit assez long !1 point1 pointet tout ca avec le sourire ultrabrite surtout vu le prix chez le dentiste 🤐1 point1 pointJ'ai vraiment eu les larmes aux yeux en regardant cette vidéo très émouvante ! 😭 Pour une fois que je pose un emoji qui pleure !1 pointIl n'y'a aucun soucis et tu n'a pas à te justifier surtout quand sa part d'un bon sentiment 😌 bonne Continuation ami Wheeler! 🤙1 point1 pointparfois les vendeurs chinois sont plus reactifs que les magasins francais en SAV et prise en charge , ils pensent q'un client satisfait reviendra acheter sur leurs sites. un detail qui a son importance surtout par rapport a la concurrence!1 point1 pointLa Nextorch ou tout produit de ce type est un bon complément afin de se faire voir en nocturne , ne pas négliger non plus les produits à base de bandes réflectives sur la roue ( obligatoires rouge sur l'arrière , blanc à l'avant ) très visible par nos amis ( ou pas ) automobilistes J'utilise souvent de nuit un produit assez exceptionnel en terme de visibilité aussi bien sur la roue qu'en moto ,très confortable ,très chaud avec une doublure thermo amovible avec protections full niveau deux (option) au look sympathique et Urbain ,la moindre lumière sur ce fameux blouson est intensifié et il devient presque impossible de passer inaperçu, une vraie ampoule sur patte , aussi un petit plus "by night " https://www.motoblouz.com/vente-blouson-bering-drift-high-visibility-170828.html1 point1 pointVoici une vidéo d'une V11 par exemple avec un point de vue un peu plus semblable: Vs No comment. 😉 1 point1 point1 pointY'A BIEN UNE VACHE QUI RIT ALORS POURQUOI PAS UN RENARD ! 😂😂 SVID_20211011_161843_1.mp4
1 point1 point1 pointY'A BIEN UNE VACHE QUI RIT ALORS POURQUOI PAS UN RENARD ! 😂😂 SVID_20211011_161843_1.mp4 1 point1 pointAh bon ! Si t’as que 350 € à mettre dans une trott, tant pis pour toi, tu peux crever ? 🤐1 point1 point1 point1 pointPendant ce temps, sur le salon Telegram de KingSong consacré la KS-S20, le porte-parole confirme (info du 9 octobre) que les énormes caissons latéraux qui abritent les batteries (entre autres ?) seront en métal. Ils serviront aussi de «coulisseaux» (? désolé je ne sais pas traduire 'sliders') pour les tiges de suspension. Rien ne dit cependant que ledit métal est un alliage aluminium ultra-léger utilisé exclusivement dans l'industrie aéronautique, fantasmé par quelques wheelers, et sur lequel KS aurait négocié un prix défiant toute concurrence. Perso, pour les 28 kg, je continue de penser que ça va être compliqué 😉
1 point1 pointAh bon ! Si t’as que 350 € à mettre dans une trott, tant pis pour toi, tu peux crever ? 🤐1 point1 point1 point1 pointPendant ce temps, sur le salon Telegram de KingSong consacré la KS-S20, le porte-parole confirme (info du 9 octobre) que les énormes caissons latéraux qui abritent les batteries (entre autres ?) seront en métal. Ils serviront aussi de «coulisseaux» (? désolé je ne sais pas traduire 'sliders') pour les tiges de suspension. Rien ne dit cependant que ledit métal est un alliage aluminium ultra-léger utilisé exclusivement dans l'industrie aéronautique, fantasmé par quelques wheelers, et sur lequel KS aurait négocié un prix défiant toute concurrence. Perso, pour les 28 kg, je continue de penser que ça va être compliqué 😉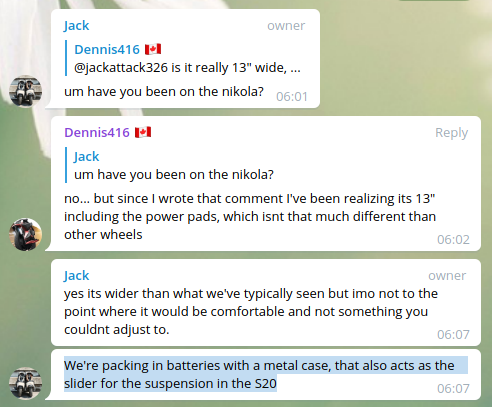 1 pointelle s'appelle chrissi je te communique son number 🤣1 pointUn peu de poésie, avec @Bonheur sur Seine ? Un peu de voyage avec @MrFlex ? Un peu d'irl avec @Draksou ? ''edit'' : et tout les Wheeler du forum esprit roue, vous êtes bien inspirant 😘. 2ème 'edit': mention spéciale pour @Hirsute sa a l'air tellement facile quand il le fait 😁 🍀🌿🍃🙏1 point1 pointOui mais il faut être patient et si tu est pressé tu la prends chez un revendeur français et là tu payes plein pot une petite vidéo de cette roue1 point1 pointSans vouloir ramener ma science .. On appelle sa des BRIDES . De manière générales toutes machines, ayant 1 ou plusieurs axes de deplacement , est BRIDée pour le transport . La bride permet de supprimer le degré de liberté . Une cale permet de comblet un jeu mecanique etc... Je suis étonné de voir un distributeur , faire une video hasardeuse comme ca , c'est pas Pro . voila qui me réconciliera pas avec le choix d'acheter chez un distrib local .1 point1 pointSalut les copains, si ça peut vous intéresser, voilà le test de la V8F que je viens de terminer : https://youtu.be/YKUDY4mIbU41 point0 pointRe, grand merci @gsalc2014. Il est clair que cela désole franchement de ce séparer de matériel neuf dont je n'ai pas réellement pu profiter. Je l'ai utilisé alors que je pensais être en convalescence, mais ma mobilité personnelle n'a fait que ce dégrader. Alors oui, je pourrais encore attendre 2 mois et envisager de remonter dessus pour enfin en profiter, mais ce serait risquer de dégrader plus rapidement une situation qui n'est pas royale. Et quant cela fait 3 mois que tu pourris la vie de ta famille car tu ne te déplaces pas à ta guise, tu fais le choix de profiter d'eux quant ça ira mieux, sans vouloir risquer une nouvelle immobilisation. Du coup je regarde distraitement du côté des trottinettes électriques pour quand ça ira, mais franchement ce n'est vraiment pas la même chose... Merci également @WenaBlack. Les identifiants sont ceux de la boutique, mais je viens d'éditer pour qu'ils n'apparaissent pas. Merci du conseil. Olivier0 point0 pointOui j'ai peut être flirter un peux avec les limites de la machine mais je pensait vraiment être protéger avec le tilt back. La roue elle va pas trop mal à part le trolley qui s'est complètement arraché. Pour mon poignet, je viens de faire un scanner et c'est plutôt une multiple fracture de la main. Ce qui me semble étrange c'est que il me semblait bien qu'on pouvait configurer la vitesse du tilt back sur Euc world, mais la je ne le trouve pas. C'est quoi la meilleur appli pour pouvoir toucher un peu à tout?0 point
1 pointelle s'appelle chrissi je te communique son number 🤣1 pointUn peu de poésie, avec @Bonheur sur Seine ? Un peu de voyage avec @MrFlex ? Un peu d'irl avec @Draksou ? ''edit'' : et tout les Wheeler du forum esprit roue, vous êtes bien inspirant 😘. 2ème 'edit': mention spéciale pour @Hirsute sa a l'air tellement facile quand il le fait 😁 🍀🌿🍃🙏1 point1 pointOui mais il faut être patient et si tu est pressé tu la prends chez un revendeur français et là tu payes plein pot une petite vidéo de cette roue1 point1 pointSans vouloir ramener ma science .. On appelle sa des BRIDES . De manière générales toutes machines, ayant 1 ou plusieurs axes de deplacement , est BRIDée pour le transport . La bride permet de supprimer le degré de liberté . Une cale permet de comblet un jeu mecanique etc... Je suis étonné de voir un distributeur , faire une video hasardeuse comme ca , c'est pas Pro . voila qui me réconciliera pas avec le choix d'acheter chez un distrib local .1 point1 pointSalut les copains, si ça peut vous intéresser, voilà le test de la V8F que je viens de terminer : https://youtu.be/YKUDY4mIbU41 point0 pointRe, grand merci @gsalc2014. Il est clair que cela désole franchement de ce séparer de matériel neuf dont je n'ai pas réellement pu profiter. Je l'ai utilisé alors que je pensais être en convalescence, mais ma mobilité personnelle n'a fait que ce dégrader. Alors oui, je pourrais encore attendre 2 mois et envisager de remonter dessus pour enfin en profiter, mais ce serait risquer de dégrader plus rapidement une situation qui n'est pas royale. Et quant cela fait 3 mois que tu pourris la vie de ta famille car tu ne te déplaces pas à ta guise, tu fais le choix de profiter d'eux quant ça ira mieux, sans vouloir risquer une nouvelle immobilisation. Du coup je regarde distraitement du côté des trottinettes électriques pour quand ça ira, mais franchement ce n'est vraiment pas la même chose... Merci également @WenaBlack. Les identifiants sont ceux de la boutique, mais je viens d'éditer pour qu'ils n'apparaissent pas. Merci du conseil. Olivier0 point0 pointOui j'ai peut être flirter un peux avec les limites de la machine mais je pensait vraiment être protéger avec le tilt back. La roue elle va pas trop mal à part le trolley qui s'est complètement arraché. Pour mon poignet, je viens de faire un scanner et c'est plutôt une multiple fracture de la main. Ce qui me semble étrange c'est que il me semblait bien qu'on pouvait configurer la vitesse du tilt back sur Euc world, mais la je ne le trouve pas. C'est quoi la meilleur appli pour pouvoir toucher un peu à tout?0 point






































Information importante
Nous avons placé des cookies sur votre appareil pour aider à améliorer ce site. Vous pouvez choisir d’ajuster vos paramètres de cookie, sinon nous supposerons que vous êtes d’accord pour continuer.