Classement





Contenu populaire
Affichage du contenu avec la meilleure réputation le 01/18/25 dans toutes les zones
-
4 pointsBonjour la communauté ! Après pas mal de temps à parcourir ce magnifique forum, je me décide enfin à m'inscrire, dans le but avoué de glaner quelques conseils, mais aussi partager ma modeste expérience. Pour l'état civil, je m'appelle Pascal et j'habite sur Paris. Il y a quelques années, je cherchais un moyen de transport alternatif pour me rendre au boulot, et surtout éviter les transports en communs. Je regardais un peu les trottinettes, sans grande conviction, et je suis tombé sur une vidéo de Hirsute sur une V5, et ce fut le tilt ! Cette engin semblait cocher toutes les cases : pratique, peu encombrant, et surtout il paraissait diablement fun ! 😁 Ayant pratiqué le monocycle dans ma jeunesse, je me suis dit que ça ne pouvait pas être beaucoup plus compliqué à maitriser, et je me suis donc lancé rapidement dans l'aventure de la gyroroue. Paradoxalement, mes anciens réflexes de monocycliste ont peut-être quelque peu ralenti mes premières heures d'apprentissage, notamment pour maitriser les virages ; j'avais tendance à vouloir forcer la direction de l'engin, alors que la gyroroue demande plutôt un accompagnement en souplesse pour libérer toute son agilité. Une fois ces premières heures d'apprentissages passées, le bonheur était au rendez-vous 😍 Seulement voilà, la V5 est une roue géniale à dompter, mais il faut avouer que pour des trajets quotidiens de plusieurs kilomètres, elle tire un peu la langue, et n'est pas d'un confort et d'une sécurité à toute épreuve. Je me suis donc tourné vers une roue plus grosse et plus puissante : la V10 Et là pour le coup, je n'ai pas beaucoup de défauts à lui reprocher pour mon usage : autonomie, confort, puissance, étanchéité. Seul un trolley branlant, qui me vaut parfois quelques frayeurs lors de certaines manoeuvres, vient ternir un peu le tableau. Maintenant j'avoue que je lorgne un peu sur les roues à suspension, et j'aurai sans doute quelques conseils ou retours d'expérience à vous demander sur le sujet 😉 Au plaisir d'échanger avec vous prochainement ! Pascal4 points
-
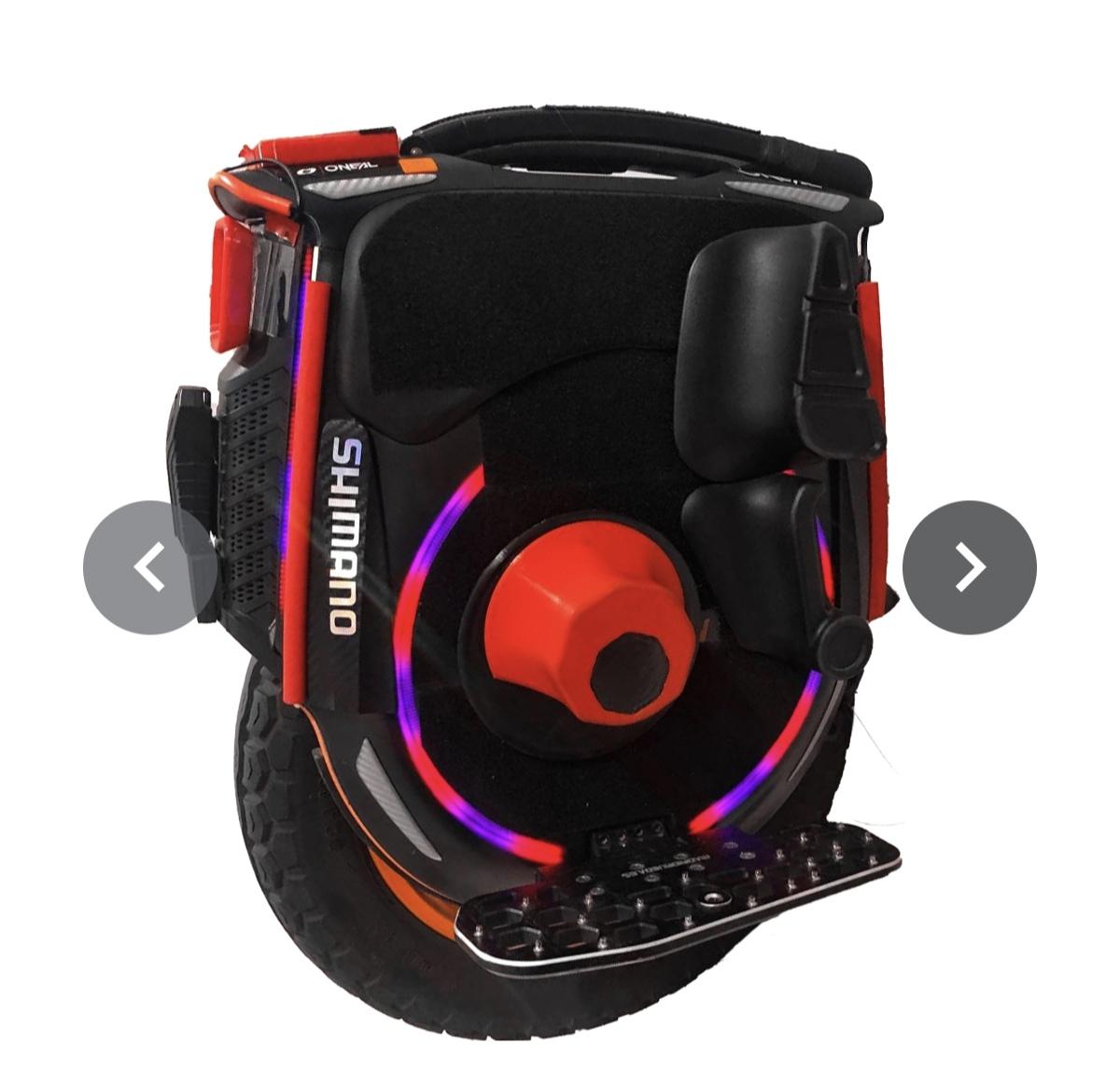
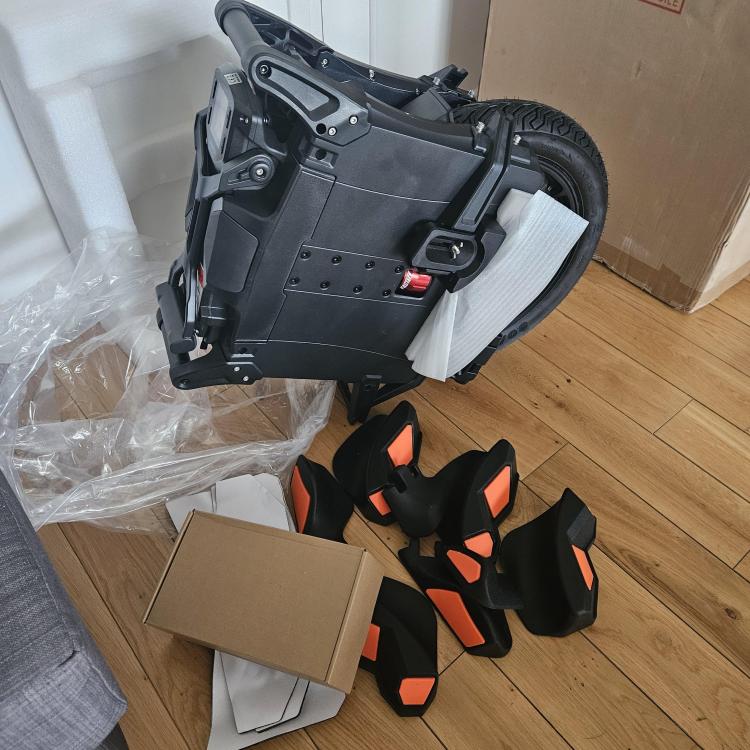
Salut les wheelers, Suite à un achat groupé, il me reste la dernière du lot, la personne qui devait la prendre s'est désisté au dernier moment. Je l'ai juste sortie du carton pour que la belle se fasse prendre en photo. C'est la version Sherman L 50S 66LBS NEUF!!!! full complète, power pads, chargeur, notice etc etc. Le prix est ferme de 3790€ pas de livraison, retrait en région Parisienne... Contact en MP uniquement. Au passage je vais rendre visite a Leaperkim en avril au pays du soleil levant, si vous avez des idées d'améliorations.... PS : L'ajout du pourcentage batterie sur la S22 de Kingsong ...on dit merci qui ??!! ;o) bonne journée



 2 points
2 points -
2 pointsMoi je ne peux pas te répondre je suis à max 2.5km/h a tout péter qd j'arrive à faire 1m avec lol !!2 points
-
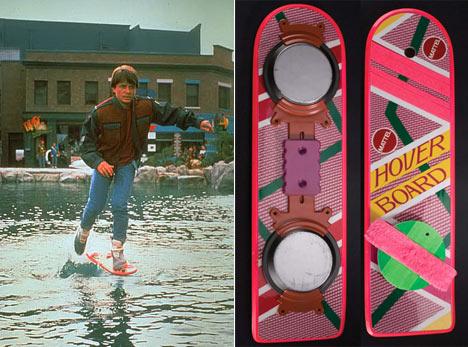
2 pointsScène sympathique par rapport à l'enthousiasme de ce monsieur: Pour ceux qui ont beaucoup de mal avec l'anglais voici quelques explications sur ce que je retiens de la vidéo: Le monsieur avec la casquette a vu quelqu'un en gyroroue rouler à 70 mph d'après lui. Il a dit qu'au démarrage à un feu la gyroroue part vraiment très très vite. Il essaie de rattraper la gyroroue. Il est très impressionné qu'on puisse rouler aussi vite sur l'engin. Il dit respecter le pilote pour ça Il aiemrait apprendre et aussi apprendre à sa petite fille Le plus drôle il a immédiatement pointé du doigt Marty en disant que c'est Marty qu'il a vu rouler aussi vite. Ils lui ont dit qu'en fait c'est Dawn. Le monsieur est encore plus surpris de voir que c'est une femme qui roulait aussi vite (à chacun ses a priori) Evidemment, il a dit que ça doit être dangereux ce truc. En tout cas, il a envie d'apprendre. Je note vraiment l'enthousiasme avec lequel il parle. On voit vraiment que pour lui c'est assez "incroyable". Dawn se propose d'apprendre à faire de la roue à toute la famille du monsieur si nécessaire.... Les échanges se font en toute sympathie et c'est agréable de voir ça. Ca peut provoquer ce genre de rencontre aussi la roue et c'est chouette 🙂2 points
-
2 pointsDUF a installé de nouveaux amortisseurs à air Starswheel sur sa V13 : Ils viennent de là : https://starswheel.com/products/test-version-inmotion-v13-air-spring-used-to-replace-the-original-air-spring-parts Et si vous avez encore 20 minutes pour écouter DUF sur sa V13 améliorée : https://www.youtube.com/watch?v=mwAR_L2Idpg Bons rides à tous.2 points
-
2 pointsSalut je viens de faire mes 5 premiers km avec la v11 y, après un temps d'adaptation je la trouve très sécurisante, super facile sur les départs arrêtés (je viens de la v8f), j'ai testé les routes crades avec les nids de poule ça passe nickel. Les descentes de trottoir aussi pour l'instant je suis très content. Trucs chiants les petites saignées dans le sens de la marche, la roue vient se caler dessus, le bip quand la limite est à 25 km il arrive super tôt, et on a vraiment l'impression de se traîner à 25 km. Encore une ou deux sorties dans ma banlieue et je vais tenter les trajets Boulot avec partie sur paris2 points
-
On commence très fort avec un film en provenance d'Inde: Indian 2. La gyroroue est la reine dans une course poursuite haletante de 10mn (à regarder entre 47mn et 57mn de ce lien). Merci Bollywood! https://www.dailymotion.com/video/x94f11i
 1 point
1 point -
Ca fait plaisir; il était temps! (S’il y a eut des apparences c’est jamais grande choses) J’ai failli faire figurant roue dans un film futuriste français; mais les EDPM ont été retirés parce que quelqu’un dans la hiérarchie n’aimais pas les trottinettes 😓 (et sympa la touche non YT)1 point
-
1 pointEn fait je pense que je serre tellement fort que c'est moi qui crée les bleus étant donné que je ne tombe pas et que j'ai toutes les protections tibia et genoux... Je dois essayer donc sans serrer c'est sûrement cela le problème. De plus je n'arrive pas à avancer droit j'arrive juste à tourner a gauche a chaque fois que j'arrive à me lancer. J'essaierai déjà sans serrer comme vous le dites tous. Et je m'aperçois donc que je n'utilise jamais les pédales en fait. Juste pour monter dessus mais je penses que l'erreur vient de là.. demain je tenterai avec vos conseils merci beaucoup !1 point
-
1 pointAbsolument, a mon avis il y a très rarement de raison de serrer, presque aucune manoeuvre ne le nécessite. La roue est bien trop lourde et les forces bien trop fortes pour que vous la reteniez en la pinceant entre les mollets, vous vous crispez pour rien. Le contrôle se fait au niveau des pédales, et seul en tournant fort la jambe sert a guider son angle (et on ne pince toujours pas) Une suggestion qui a aidé mon frère a tourner avec les pédales (sans pincer la roue): lever le poids d'une jambe pour laisser pencher la roue de ce coté.1 point
-
1 pointEssayez de rouler en ouvrant les jambes et de ne pas toucher la roue. Seules les pied ont un contact avec la roue. Je pense que cela peut etre un bon exercice pour vous.1 point
-
1 pointY'a ça... https://www.huffingtonpost.fr/insolite/article/face-au-cybertruck-de-tesla-les-francais-repondent-c15-et-la-comparaison-tourne-a-l-avantage-de-citroen_237047.html1 point
-
1 pointJe suis à la Maif. Après la V8f suis passé à la V11y et à part leur donner les refs ils n'ont rien demandé d autre. C'est juste la Rc de base. Pour dédommager les autres au cas où. Basta. Arrêtez de vous prendre la tête pour rien!1 point
-
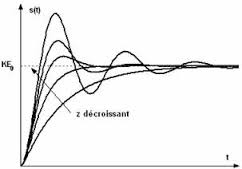
1 pointOui, car comme monsieur Jourdain, nous bouclons des tas de choses sans vraiment en prendre conscience. Un exemple : conduire une voiture consiste à se déplacer sur un terrain long et étroit nommé route, sur une voie éventuellement matérialisée par de la peinture au sol. La consigne, c'est le milieu de la voie, les capteurs ce sont nos yeux, l'actionneur c'est le volant. Dès que la trajectoire s'écarte de la consigne, le conducteur (qui fait partie de la boucle) compense, mais avec souplesse et anticipation (PID). Il restera toujours un petit écart car notre gain n'est pas infini. De plus, il faut introduire la notion de bande passante, c'est à dire notre temps de réponse aux écarts instantanés et, pour le long terme, la précision de notre vision et de la cinématique de direction de la voiture. L'imprécision stochastique qui fait frétiller la voiture autour de la consigne est souvent nommé cycle limite. L'écart résiduel est souvent nommé "traînage", il est inversement proportionnel au gain de boucle. Remarque : ce gain s'effondre littéralement quand le conducteur a picolé. . En gros, il n'y a que 3 éléments à considérer : le capteur (yeux), le pid (pilote), l'actionneur (volant+roues). Tous les éléments perturbants (vent, glissade, réaction centrifuge, jeux mécaniques...) sont secondaires car inclus dans la boucle. Bien entendu, si la perturbation est trop importante : sortie de route. Remarque importante sur la fonction pid. Dans un asservissement mécanique, faut tenir compte de l'inertie car si on se contente d'une action proportionnelle, le recalage dépassera la consigne et induira une instabilité, c'est à dire une oscillation à la fréquence propre (résonance de boucle). Il faut converger vers la consigne en respectant si possible l'amortissement critique, c'est à dire la 2ième courbe en partant du bas. Le pid devra donc posséder une action différentielle (une avance de phase) afin de compenser l'intégration (le retard) dû à l'inertie mécanique. Il y a des méthodes pour analyser le comportement spectral d'une boucle : diagramme de Nyquist, Black Nichols etc... Une roue a un asservissement à double boucle, une boucle lente associée aux accéléromètres (utilisés en inclinomètres) et une boucle rapide associée aux capteurs gyromètriques (rotation angulaire), cette dernière fait office d'avance de phase puisque par nature elle détecte les variations. Tant que les boucles n'arrivent pas à annuler l'inclinaison, elles feront croître la vitesse de rotation moteur et le courant... quand le pwm à 100% est atteint, il est maintenu mais la roue plonge. Les bons pilotes arrivent à rattraper cet écart croissant, si non, pouf. Si le pilote réagit vite, la coque pourra annuler l'inclinaison ce qui fera décroître le pwm. Ce taux de charge pwm est une conséquence, pas une cause, l'asservissement ne s'en occupe qu'indirectement.
 1 point
1 point -
1 point
-
1 pointPour information, dimanche ça balance pas mal à Paris avec l'anumme : https://www.anumme.fr/2025/01/06/wheelers-a-lassaut-de-paris-grand-randonnee-anumme-en-roue-electrique-janvier-2025/?fbclid=IwY2xjawH4UtdleHRuA2FlbQIxMAABHVeboUMQfomU4-4VCONsx9laAsBwtjgcnHUgQAXfSCuVLsHVX3zXbHnv_Q_aem_04Gox0hIidTLcZT8mWvHvQ Au nord-ouest également : https://www.facebook.com/events/5939131734936001 point
-
1 pointClairement ta perte d'autonomie ne semble pas normal. J'ai justement réalisé un test d'autonomie sur une vieille S18, son kilométrage est légèrement moindre que ta roues mais de base la S18 n'est qu'en 1110wh. Pourtant le test me donne une autonomie convaincante (vu les conditions et l'âge de la bête) je n'ai jamais fais attention aux batterie (en dehors d'une recharge plus longue tout les 10/15 cycle et bien entendu aucun entreposage si la roue est vide ou complément pleine ) et je roulais plutôt fort avec cette roue (fort pour une S18 bien-sûr 😂). En 9/10 K km et 4 ans je suis passé de 60km en roulant à vitesse moyenne de 30km/h, dans des conditions parfaite, à 44.4 en roulant de manière similaire mais dans des conditions météo/ température bien plus dure. Si tu es curieux j'avais fait à l'époque une vidéo comme "preuve" 😅. Effectivement ta batterie doit avoir un problème 😕.1 point
-
1 point
-
1 point
-
1 point
-
1 pointUne ninebot one E+ avec 22 km/h et 22 kms d'autonomie (histoire que tu deviennes accro, et que tu passes du coté obscure comme nous tous).1 point
-
1 pointC'est le pied cette inmotion v12, elle est très joueuse et nerveuse. Pour mieux la contrôler j'y est installé les pass d'origine de la v13, et je dois dire que ça fait bien le job Ça me change de la v13, à 50 kmh j'ai l'impression que je vais m'envoler avec la V12, alors que sur la V13 à la même vitesse j'ai l'impression d'être à l'arrêt. Sinon, elle respire la qualité cette roue, elle est vraiment bien fini 👌 Je ne regrette pas mon achat J'ai également commandé des jump blocks pour être sûr de ne pas décoller

 1 point
1 point -
1 point-30% d'autonomie parce que la roue à 10000km, ça n'a pas de sens 🙃sauf si il y un problème de cellules hs.(bien-sûr une petite perte est possible) Chacun fait ce qu'il veut mais pour moi "Chouchouter" ses batteries ne change pas grand chose à l'autonomie car à part être un gros rouleur, les cellules s'usent davantage par viellesses que par leurs "mauvaises" utilisations. 😮1 point
-
1 point30% c est énorme pour 10000km. Tu est sur d avoir fait dans les même conditions (poid, température,type de conduite)? Ta roue charge entre 83 et 84v?1 point
-
1 pointSalut, Je viens aussi d une v8f et au début oui on a bien l'impression que la roue part à la moindre mini saignée dans la chaussée ou moindre dévers mais la sensation s estompe avec le temps, peut-être es tu trop gonflé. Au début également je roulais sans pad mais depuis que j en ai rajoutés je trouve que cela apporte un confort et plus de sécurité car la roue est quand même lourde. Quand à l amortissement, pareil je n'ai pas de point de comparaison mais j en suis satisfait. La pneu n'aime pas la boue, mes cotes s'en souviennent encore! Elle est bien étanche par contre! Bon ride et profite bien!1 point
-
C'est tout le principe des assurances responsabilité civile sur le domaine publique : Un contrat de droit privé qui couvre les frais chaque fois que le signataire responsable a enfreint le Code de la Route et entraîné des dommages à un tiers. Bien sûr l'assureur va mettre le montant des cotisations au niveau des risques que lui encourt : Peanuts pour un EDPM, moyen pour une trapanelle à 4 roues, très fort pour un puissant SUV conduit par un jeune conducteur, ou bien ÉNORME pour un supertanker hors d'âge qui croise dans une zone de tempêtes violentes. On peut assurer n'importe quoi! La question n'est pas de savoir si l'assurance va te couvrir puisque c'est dans ses obligations légales (Code des Assurances), quitte à se retourner ensuite contre toi si tu leur a trop coûté d'argent, mais les personnes lésées par toi seront forcément indemnisées. Le Code de la Route t'impose d'avoir une assurance RC (...sinon c'est 500€ d'amende immédiate!) et le bon sens t'impose d'être prudent pour ne pas avoir d'accident : C'est aussi simple que ça.1 point
-
0 pointEt bien tu as bien de la chance de l’avoir reçu. Le vendeur rakuten a annulé ma commande 1 semaine après l’avoir confirmé… je suis dégoûté. Je ne pense pas qu’on la revoie à ce prix la de si tôt.0 point
-
Vous avez avancé l'argent et le gars s'est désisté ??? Sérieusement ???0 point