



Classement
-
Philippe Sence
Membre8Points45Compteur de contenus -
King Size
Membre7Points7010Compteur de contenus -
Abi Man
Membre4Points18Compteur de contenus -
Techos78
Membre4Points8256Compteur de contenus



Contenu populaire
Affichage du contenu avec la meilleure réputation le 08/07/21 dans toutes les zones
-
3 points@misc , je te félicite de te plonger dans tous ces principes cinématiques, plutôt mal connus. A mon avis, tu te concentres trop sur les pédales, et ajouter des capteurs de pression à ce niveau serait a priori inutile, une e-roue ne fonctionne pas comme ça. Une roue comporte un asservissement double, avec une boucle rapide (bande passante ~20 Hz) qui détecte la rotation angulaire issue d'un gyromètre , et une boucle lente (hybridation, précession ~5°/s) issue d'accéléromètre ( -> inclinomètre) pour recaler sur la verticale (apparente), ces deux "inputs" sont mélangés, traités, modifiés pour créer des variations de vitesse qui sont injectés au moteur. Le capteur gyro+accéléro est généralement un MPU-6000. Tout cela de manière incrémentale, et on ressent le "fourmillement" quand on est immobile : le moindre déséquilibre crée une très petite rotation angulaire (début de chute) qui déclenche immédiatement un déplacement du champ tournant moteur pour annuler la détection, afin d'aligner le centre de gravité pilote+roue et le point de contact au sol. Les pédales ne sont que des interfaces pilote--roue, dans un but purement ergonomique, on peut monter debout sur la coque ou même laisser la roue rouler toute seule (une fois lancée). Bien sût, la géométrie des pédales et le point de contact au sol (qui se déplace selon la pente) complique le pilotage, mais c'est juste un problème de confort, l'asservissement ne tient compte que du couple appliqué à la coque, éventuellement en tirant sur la poignée ou à l'aide de pads. Tout cela n'est pas modifiable, et est soumis à des critères de stabilité drastiques (Nyquist, Shannon, Gauss, Black, Nichols..etc.). C'est coriace, et je sais de quoi je parle !. Mais, sans toucher ce cœur relativement critique, rien n'empêche d'ajouter une ou plusieurs entrées, au niveau du point de sommation des deux boucles. En fait, cela existe : certains scooters mono-roue possèdent une poignée d'accélération et un frein. Effectivement, le pilote qui a les fesses vissées sur la selle a du mal à imprimer un déséquilibre suffisant, ces entrées accentuent les déséquilibres av. ou ar. par simple décalage du point de consigne de verticalité, de la même façon qu'un tilt-back. Mais injecter une entrée nécessite des ressources matérielles (codeur A/N au niveau du µcontrôleur) et un firmware adapté... gros travail , et bon courage si tu t'y colles.3 points
-
3 pointswoaw.. double fracture.. en effet ça ne rigole pas la gyroroue.. navré pour toi j'ai moi aussi fait ma premiere gamelle d'hier lors de mon premier essai avec des petites chaussures bateau, bien sur sans chaussettes. La vraie mauvaise idée quoi. Aujourd'hui, c'était Bottes/Pantalon/Genouillères de moto cross. .. et béquilles (comment ça pas normal ?) Concernant le bar, OUI, tous les Wheelers sont les bienvenus chez moi, une prise extérieure vous sera toujours proposée en accès libre. https://goo.gl/maps/CECKTAhVFJ61qMeM83 points
-
2 points3e jour de découverte Ce matin, j'arrive à lacher une des 2 béquilles, celle opposée au sens de rotation de mon rond perpétuel. Je suis de plus en plus à l'aise avec mes béquilles, je dois me lancer. Je suis donc aller sur un parking, et sans les mains. Bien sur avec la totale, casque, genouillères, gants, etc.. ça va pas trop mal en ligne droite, départ sans appui pas trop mal, arrêt en douceur pas mal, mais les virages c'est pas ça du tout. J'ai donc décidé de changer de spot et de stratégie, je suis aller au bord du canal du midi, pour travailler d'abord ma ligne droite. Après 2 kilomètres, je suis déjà crevé, mal partout, à force de compenser avec mes pieds, j'ai eu quelques moments tranquille en mode relax, mais j'ai peur de tomber dès que je prends trop de vitesse. à ce sujet, j'ai une drole d'impression que les plateaux ne sont pas au niveau horizontale, alors j'ai essayé de regler l'assiete avec l'appli inmotion, mais j'ai comme le sentiment que ça bouge avec la vitesse, et c'est très destabilisant, peur de tomber en avant.!! Sinon, à part ça tout baigne, l'oiseau a quitté son nid, et demain j'y retourne (oui je fais de la guitare dans un groupe, hard blues rock à tendance Death Metal)2 points
-
2 pointsJe roule en roue avec mon fils depuis quelques années, et je l'utilise pour aller au travail (2km) et pour promener mon Border Colie dans la forêt. Mes deux Ninebot one s2, m'ayant lâché quasiment la même semaine, j'ai décidé de passer à plus gros pour tracer des parcours vtt plus techniques et avec plus de dénivelé. J'ai donc opté pour la kingsong S18, et j'ai plein de questions !!! Rendez-vous sur le retour d'expérience S18 !2 points
-
2 pointsJe voudrais tempérer la réponse de @Minch : Le hors agglomération est en effet interdit sauf...sur voies cyclables et voies vertes. Or il se trouve que nos gouvernants, dans leur infinie mansuétude, ont décidé d'un Plan Vélo destiné à couvrir la France de ces voies cyclables : Il en résulte que l'on peut parfaitement rouler dessus si l'on remplit par ailleurs les conditions "apparentes" normales d'un EDPM (Feux, catadioptres latéraux, bandes réfléchissantes avant et arrière), augmentées d'une exigence supplémentaire : Le port d'un gilet jaune réfléchissant (où autre moyen similaire...). Le wheeler pourra avoir la sagesse de montrer par ses accessoires de sécurité additionnels (casque et protections corporelles) qu'il n'est pas un inconscient à tendance suicidaire. Ceci dit je rejoins tout à fait @sbouju sur le sentiment d'insécurité de ces voies limitées à 80 km/h...pour certains seulement. Lorsqu'un camion vous dépasse, il est préférable d'avoir une roue lourde, rapide et puissante et de faire soi-même un bon quintal pour ne pas être déstabilisé par la masse d'air déplacée. À tout prendre il serait préférable de s'en tenir aux micro-chemins vicinaux moins rapides, chemins de terre (un minimum carrossable!) et chemins forestiers... Bref! Les chemins recherchés par les road-trippeurs de notre Ordre... Je te salue, @Abi Man. PS : Le complément est là :
 2 points
2 points -
2 pointsPour rappel, en France, ce qui n'est pas explicitement autorisé par la loi est présumé interdit. Ce paradigme est à l'opposé de celui qui s'applique dans la plupart des pays anglo-saxons et chez plusieurs voisins Européens (dans lesquels ce qui n'est pas interdit par la loi est autorisé). Or les EDPM sont entrés dans le code de la route avec la Loi d'Orientation des Mobilités (LOM), et ajoutés explicitement (sous conditions) à la liste des véhicules terrestres à moteur (VTM) autorisés. Donc depuis 2020, Il n'y a plus qu'à respecter, autant que possible, les conditions légales prévues par la LOM, et ça roule. Plus d'informations à ce sujet : https://www.anumme.fr/lien-utiles/loi-decret-code-edpm/2 points
-
Gros soulagement [emoji25] Dans le post original il était aussi question d’arrêter la production des Sherman... Envoyé de mon iPhone en utilisant Tapatalk Pro2 points
-
2 points
-
1 point
-
1 pointCher @bASKOU, tout ce que tente @Abi Man est conforme à la loi : Autant sa demande d'autorisation de passage sur une certaine route sur laquelle il ne serait pas le bienvenu sinon, que le délai de 2 mois qu'a toute administration pour lui répondre. Maintenant je crois que sa préoccupation première est de se trouver une roue qui lui convienne. Bonne chance @Abi Man!1 point
-
1 pointPas pu résister à l'attrait d'un petit galop d'essai d'une (petite) vingtaine de kilomètres. Résultat : très content de cette acquisition ! Sauf les pads qui sont vraiment inconfortables. Enfin je retrouve une roue qui dépote ! Dommage pour ceux qui n'ont pas su profiter de l'occasion.1 point
-
après avoir vu l'engin et les caractéristiques , ca fait fait vraiment envie! pas dans mon budget mais je kif grave le concept est excellent!1 point
-
1 pointHa ha bien vu @King Size ! Pour le moment la réponse automatique : Donc j'ai bon espoir d'être au moins aiguiller dans le bon service. Mais ton idée est bien en fait, je suis complètement du même avis que @bASKOU : Je pense aussi que bien équipé, visible, courtois et de bonne foi en montrant que la demande à été faite, l'agent devra être sacrément zélé pour mettre une prune. En général j'ai pas trop de problème avec les FDO. Au passage j'ai déjà fait cette portion de route en longboard et une fois les gendarmes n'avait pas trop l'air d'être inquiétés en me dépassant. Mais peut être que là c'est autorisé je sais plus très bien 🤔🙄🙃!1 point
-
1 point@Abi Man il n'y a pas de liste. Tu dois faire une demande de dérogation à l'autorité compétente (C'est ici que c'est flou) pour faire une demande de dérogation qui t'es propre et rien n'est spécifié sur la durée, ma pensée la dessus c'est que tu as un plan pour effectuer un voyage et que tu dois demander une dérogation pour chaque route hors agglomération à l'autorité qui est responsable de cette route.1 point
-
Idéalement il faudrait mettre les prises en accès libre dans OpenStreetMap, on pourrait sortir facilement les données ensuite. Il y'a déjà des tags pour les vélos électriques dans OSM : https://wiki.openstreetmap.org/wiki/Key:electric_bicycle ; https://osm.org/node/80257246011 point
-
1 pointIntéressante comme discussion… (sans ironie). Merci pour ces partages. Comme d’hab, je crois comprendre que, faussement je pense avoir compris les quelques idées principales, mais que non finalement je ne comprends pas tout, et que je suis incapable de re-expliquer ça [emoji28]1 point
-
1 point@Minch a eu la gentillesse de me contacter en mp du coup dans ce sens là ça passe merci à lui. Et puis avec ce message ça fera huit, plus que deux et à moi le god mod sur le forum (enfin presque 😁) ! Du coup la tesla, vélo de course ou VTC ? Si VTC alors ça devrait convenir. J'ai vu aussi passer quelques Inmotion V11 en occasion. Mais là c'est peut être un peu gros pour le train et surtout niveau fiabilité j'ai lu un peu de tout.1 point
-
1 pointHumm… Pas la même utilisation (comme comparé un vélo de course, un VTC et un VTT : ils sont tous maniables et performants pour le domaine d’utilisation qui a prévu). je dirai plus tôt que la ks16x t’emmènera avec plus de confort sur des routes et chemins où la Tesla montrera quelques limites. Inversement la Tesla se révélera plus agréable et a l’aise dans des circonstances et des endroits où la ks16x sera moins adaptée. Ah le dilem du choix [emoji1787][emoji1787][emoji1787] Il faut une dizaine de message une fois inscrit au forum pour avoir pleinement accès au MP et à la partie des petites annonces…1 point
-
Et ce en contradiction flagrante avec l'article 5 de la constitution de 1789 communément appelée "Déclaration des Droits de l'Homme et du Citoyen" toujours à la base de notre droit national : Voilà donc pourquoi nos avocats sont si gras et nombreux et les diverses cours tellement surbookées... Mais il est vrai que le gouvernement a pris la mesure de la menace que nous représentons et que maintenant les EDPM sont devenus légaux de par la LOM, et donc que la plupart de nos engins sont devenus parfaitement illégaux. Rappelez-vous du terme "par construction", il n'est pas anodin.1 point
-
1 pointMerci @King Size @bASKOU @sbouju pour ces précisions. Pas simple tout ça et un peu étrange que la liste des voies praticable par dérogation ne soit disponible nul part. Étrange également de séparer les vélos du reste ? C'est un peu comme dans mon travail, on peut prétendre à une prime si on vient en vélo ou vélo électrique mais pas pour les autres EDPM et pas non plus si on vient... à pied ! Pour mon cas ces 30km ce serait vraiment rare, juste lors de gros soucis de train... 😇 En vélo ça ce fait pas trop mal. La route traverse plein de villages, c'est la route des château (Chenonceau...) les portions à 80 sont rares et courtes. Après il y a le GR41 mais pour le coup c'est exclusivement piéton je crois... pas simple ! Comme tu dis @King Size même si c'est plus long ce doit être bien plus agréable sur des petits chemins !1 point
-
1 pointSalut bienvenue sur le forum. Il est interdit de rouler sur toute voie avec une limitation de vitesse de plus de 50km/h sauf si il y a une piste cyclable. Personnellement je faisais 42 km par jour sur de routes annexes et je croisais les FDO tout les jours sans problème mais celà ne représente pas forcément ce qui peut se passer partout en France. Après je suis équipé de la tête au pied, respecte le code de la route (sauf la limite de 25km/h sur nos véhicules) et toujours courtois avec eux. Puis niveau distance 30km en un coup c'est long et il vaut mieux avoir de la marge pour ne pas finir le trajet à 5km/h. Donc une V5F pour se genre de trajet c'est limite.1 point
-
Voilà 3 ans que je quadrille la région en gyroroue, et je peux l'affirmer : La gyroroue à Annecy, ne se résume pas au tour du lac 😉 Pour donner envie et pour faciliter la recherche d'itinéraires à ceux qui viendraient séjourner dans la région, je partagerai ici des tracés GPS de sorties réalisées à plusieurs reprises en Gyroroue. Les tracés GPS seront disponibles sur VisuGPX qui permet l'ajout de commentaires, l'analyse et l'export des GPX. Notes : Les traces débutent et se terminent proche de chez moi. Je recommande comme point de chute le parking du Complexe Sportif Marcel Dassault à proximité. C'est gratuit, proche de la sortie d'autoroute et il y a globalement toujours de la place D'ailleurs, d'ici il est possible de rejoindre le lac par piste cyclable protégée Vous trouverez également sur certains tracés des ballades dans le Vallon du Fier accessibles directement en partant d'ici La plupart des tracés emprunteront à plus ou moins forte dose des tronçons de route, mais toujours sur les axes avec le moins de circulation constatée Les tracés sont très souvent enregistrés sans pause, il n'y a plus qu'à insérer le pic-nic ou le restaurant 😁 Ils sont combinables pour de plus grandes et belles sorties Sorties et ballades en gyroroue validées sans recharge pour modèles de plus de 1550Wh Petite boucle du lac de la Balme : 21km Petite boucle Allonzier-la-caille : 25 km / D+500 m Boucle Poisy Lovagny par la Montagne d'Age : 35 km / D+600 m Boucle Allonzier-la-caille : 35 km / D+680 m Tour du lac d'Annecy par le col de la Forclaz et Bluffy : 66 km / D+1140 m Col et plateau des Glières depuis Nant Sec : 75 km / D+1860 m Le Semnoz par Quintal, col de Leschaux et tour du lac d'Annecy : 85 km / D+1790 m Le mont Revard : 97 km / D+2010 m Sorties et ballades en gyroroue nécessitants une petite pause déjeuner / recharge pour rentrer sereinement Serrières en Chautagne via le col du Clergeon et retour par Seyssel : 101 km / D+1950 m Les tracés sont également consultables via cette carte interactives : LeLion74 sur VisuGPX Si vous venez dans la région, n'hésitez pas à me prévenir en m'envoyant un message par le site !
 1 point
1 point -
1 pointLa MCM5 sera juste (il manque quelque wh et c’est une roue très dynamique). C’est plutôt une citadine. La KS16S et la V10F, ça pourrait le faire… Pour faire 50km l’esprit tranquille, il faut quand même plus de 1000wh et il faut être léger (le poid a un impact énorme sur l’autonomie), ou rouler doucement, à l’économie (j’entend sans grosse accélération/freinage et à 15-20km/h). La KS16X, c’est une taille au dessus. C’est justement Minch qui vend à un prix hyper interessant sa Tesla V2, survitaminée en 1480wh (contre 1000wh sur les modèles de série) : pour moi c’est une affaire (que je n’achète pas car j’ai la Tesla T3 en 1500wh)1 point
-
1 pointBienvenue @Abi Man, en ce qui concerne le choix d'une roue, ça dépend de l'autonomie de la puissance du type de chemin/route que tu comptes emprunter, l'état du chemin/route.. pour une première roue soit tu achète une roue d'occasion comme @Philippe Sence, que tu comptes revendre dans tout les cas, ce qui est légitime car l'apprentissage peut être long. Ou alors tu joues la carte du long terme mais faut pouvoir anticiper sur tes projets wheel (ex: off-road, road trip, changement de taff...) Bref il y en a forcément une pour toi 😉1 point
-
1 pointbonjour et bienvenue, je suis comme toi et je viens juste de m'acheter l'Inmotion V5F pour 230€ d'occaz sur LBC. je te la recommande, elle est top !1 point
-
1 pointSalut @Philippe Sence, Pour les béquilles, ne t'inquiète pas : Il y a un précédent de taille sur le forum avec des bâtons de marche et tout le monde essaie de lui faire croire qu'il (moi) est...normal. (ou presque!) Non! L'information la plus importante c'est qu'il y a sur Agen un Bar-Tabac "wheel-friendly" où des riders en mal de prises pourraient recharger!!! Sois le bienvenu sur ce forum, ami rider.
 1 point
1 point -
1 pointHoula!!! Toi, tu veux nous attirer des migraines... Voici le plus simple que j'ai trouvé : Maintenant je vais aller me coucher avec une aspirine. 😳1 point
-
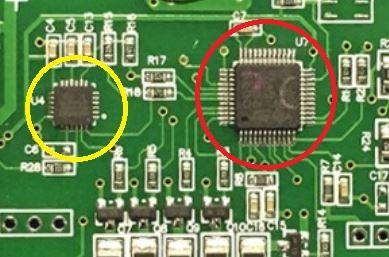
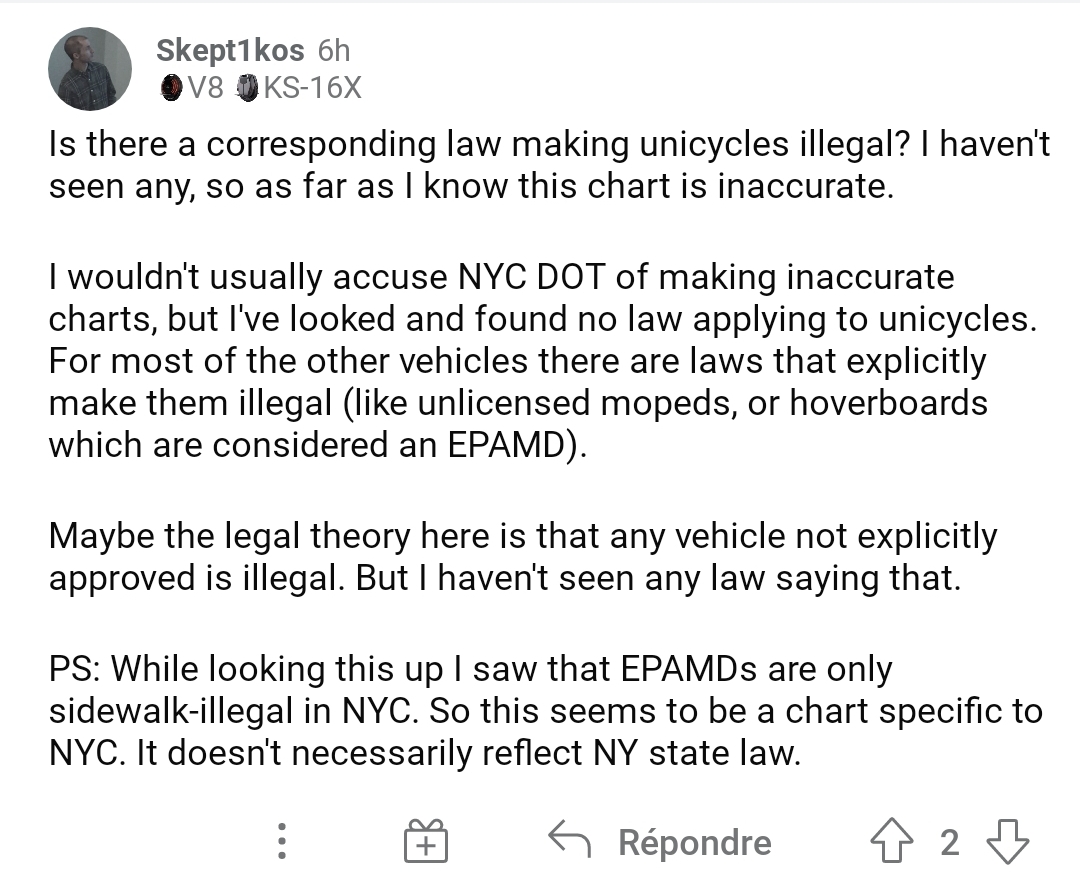
1 pointIl me semble qu’elles n’ont jamais été légales et que ce graphique ne fait que rappeler la loi.. (?) edit: c’était pareil en 2017 déjà, à priori rien n’a changé. C’est Reddit qui astique des hommes de paille, normal quoi.1 point1 pointL'autre avantage serait d'avoir la dissipation de la chaleur de la carte-mère par cuisson des mollets du wheeler. Du coup plus besoin de buzzer en cas de surchauffe, les alarmes de température se faisant par hurlements... Reste à codifier la pratique : Un cri court = 60°, deux hurlements stridents... It's a joke!1 point1 pointPas mal en effet, avec cependant un gag : à 1:13 l'exemple d'une caméra stabilisée (gimbal) n'est pas pertinent car il faut à coup sûr des capteurs gyrométriques, et optionnellement accélérométriques seulement dans le cas où elle dispose de la fonction inclinomètre (pour éviter la mer qui penche...). De plus, dans cet asservissement de type plateforme, il faut intégrer les rotations angulaires pour déterminer les angles... bref, mauvais exemple. Eh oui, il est important de ne pas confondre les capteurs. On peut définir l'attitude (le comportement) d'un objet dans l'espace à l'aide de 6 paramètres : 3 accélérations linéaires et 3 rotations angulaires. Avec cela, il suffit de connaître le point de départ pour faire de la navigation, ce qui permet à chaque instant de savoir où on est et ce qu'on fait. Le MEMS de nos e-roues incorpore les 6 capteurs sur la même puce (par exemple : MPU-6000 en jaune), et est associé au µcontrôleur (souvent un Cortex STM32F103 en rouge) : Les gyromètres gèrent la boucle d'asservissement rapide en tangage, les accéléromètres gèrent la boucle lente (hybridation) pour fixer la verticalité. Diverses combinaisons de ces mesures définissent les seuils d'alarme d'angles de roulis et permettent le calcul nécessaire pour passer du repère XYZ engin au repère XYZ géographique. Comme chacun sait, Einstein base ses théories de la relativité sur le principe d'équivalence, c'est à dire que la gravité est indistinguable d'une accélération linéaire, on peut donc réaliser la fonction inclinomètre à l'aide d'un accéléromètre, la mesure étant corrigée par trigo (surtout pour les grands angles) pour déterminer la projection dans l'intervalle -90°...+90°.
 1 point
1 point










Information importante
Nous avons placé des cookies sur votre appareil pour aider à améliorer ce site. Vous pouvez choisir d’ajuster vos paramètres de cookie, sinon nous supposerons que vous êtes d’accord pour continuer.