Classement
-

marko
Membre10Points2338Compteur de contenus -
Franck MEO
Membre6Points688Compteur de contenus -
stip93
Membre5Points319Compteur de contenus -

S3RG3I
Membre5Points990Compteur de contenus




Contenu populaire
Affichage du contenu avec la meilleure réputation le 05/26/19 dans toutes les zones
-
3 points
-
3 pointsOn peut même débuter avec une Z10 c'est ma première roue et tout se passe bien.3 points
-
2 pointsStyle néo-rétro !!![emoji38][emoji38][emoji38][emoji38] J'ai fais guère mieux sur ma SM4 Pro. Envoyé de mon Mi MIX 2 en utilisant Tapatalk2 points
-
2 pointsLa photo est truquée. La preuve, il y a de l'eau dans mon verre !!!!2 points
-
2 points@spiken, une recharge 1h40 a mi chemin avec un chargeur 5A. Fini a 10% de batterie.

 2 points
2 points -
2 points
-
2 points
-
Euh..... de quel droit il qualifie les utilisateurs de trottinettes de tueurs et terroriste ? C'est une diffamation globale ça On notera que dans l'esprit, que je considère étroit, de ce monsieur, en fait seul la situation parisienne est prise en compte.... Oh là là, 23% d'accident en plus, pour 130% de véhicules vendus en plus sur la même période !! (C'est lui qui l'annonce), donc, on à une chute énorme de l'accidentologie alors ?2 points
-
2 pointsHaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaa !!!!!! Je vais aller courir tout nu dehors !!!!! Merci les amis. Je croyais que je devenais complètement fou. Je vais inverser le vert et bleu, et laisser le jaune <-> jaune. Du coup, plus besoin de photo du câblage, ce que j'ai fait peut rester tel tel. Ps : que ferait-on sans EspritRoue et les forums dans leur ensemble ? Je vais quand même aller courir tout nu dehors moi ...2 points
-
1 pointBonjour, voilà je me présente je suis nouveau utilisateur d’une roue électrique. Je me prénomme , Claude et je possède une roue Ninobot Z10 Comme On dit tout les conseilles sont bon à prendre [emoji1787][emoji1787][emoji1787] Envoyé de mon iPhone en utilisant Tapatalk1 point
-
Impressionnant ! Exactement ce que je voudrais en version moteur raptor ^^ J'aurais au moins des traces à suivre ?1 point
-
Fallait pas dire ca à @S3RG3I, regarde maintenant avec tes bêtises il a pété un câble il nous créer des trott au calme1 point
-
1 point
-
1 pointMode crevard on : ok je te les prend a 30€ livrée ? plus sérieusement il doit juste avoir une petite manip a faire pour profiter de ces super pédales. Avec un autre aimant localise ceux sur les pédales nikolai , tu repères la hauteur, puis tu en met un dans la roue à la bonne hauteurs en le noyant dans du silicone et basta le tour est joué.1 point
-
Et que dire d'un automobiliste wheeler ? Je fais 25km en voiture puis 2 en roue. Je suis un monstre !!!1 point
-
- Comme d'habitude j'ai ma Raptor - Pour la fatigue rien à voir avec mon Bruxelles Paris en 1 jour mais il faut admettre que le vent a été infernal toute la journée. - Et en dernier c'est moi qui a la plus grosse...je parlais d'autonomie bien sûr...il me restait 50 km en stock.. mais je ne fais pas non plus le poids de @marko ... pauvre roue ?1 point
-
Pour ceux qui aiment les grands espaces, ci-dessous le point haut du village (Panoramique) ou nous faisons étape.
 1 point
1 point -
Lol, j'avais pas vu qui avait écrit ce message je savais que c'était toi, je ne me suis pas trompé ! Mais effectivement je suis d'accord avec @GyroRideRz la Z10 est spéciale, sans tomber dans le sectarisme. La conduite est sportive et physique, ça procure beaucoup de plaisir ! A côté les autres roues sont "utilitaires"... Il lui manque juste un peu de couple je trouve...1 point
-
1 pointIl veut dire différents chargeurs. Si un achat groupé se fait, ça pourrait m’intéresser aussi Enfin si la province serait éligible ... Des bisous ? Nrv1 point
-
Je vais certainement pas montrer ca a ma femme car je vais etre mis au meme standard d'ordre et proprete ... bon courage. C'est quoi au menu ?1 point
-
Salut @stip93 Pour le craquement, il faut serrer beaucoup plus fort le collier de serrage a attache rapide et mettre aussi un coup de graisse au lithium tout autour avant de le serrer .....1 point
-
1 pointbon bah j'ai parler trop vite ya encore ce magasin qui en vends a 55 dollars au temps pour moi^^ bon après sur le site il propose que le canada et les etats unis mais c'est peut etre possible d'envoyer en europe lol tu leur as demander @Tank?1 point
-
1 pointDu coup on en est ou avec les charge doctor ? le vendeur a abandonné les particuliers pour livrer des gros clients ou bien? ça se passe comment ? les retardataires ont ils reçu leurs précieux? je demande car j'ai un bonne piste l'ami d'un ami qui est chinois et qui a des contacts pour en avoir modele avec 2 prise pour brancher 2 chargeurs j'essaye de faire baisser le prix mais j'ai besoin de commandes si vous etes interessé repondez ici (je suis sur paris) et je n'ai aucune idée de comment gerer un achat groupé et redistribuer dans toute la france sans me ruiner en frais d'envoi etc etc... evidement je ne cherche pas a me faire une marge moi même (je suis heureux d'aider comme j'ai beaucoup été aider en arrivant ici^^) voila voila faites moi signe BON SAFE RIDE A TOUS DES BIZOUS1 point
-
1 pointc'est un site polonais je peux les appeler et traduire si besoin est ^^1 point
-
Comme tu dis. Mais bon le projet de loi est déjà fortement influencé par la situation parisienne. C'est fou que des gens aient dû monter sur le bûcher (et puis c'était long à l'époque, les allume-feu n'étaient pas ce qu'ils sont aujourd'hui) avant qu'on admette que la terre est ronde, et de se retrouver aujourd'hui avec des "élites" qui croient que le monde se termine aux frontières de Paris, et au delà, le chaos, les hordes barbares et les démons. Bretagne indépendante !!!! [ok je sors]1 point
-
@minch je dois admettre c'est moi qui ai eu l'idée et c'est Marc qui a pris la photo..1 point
-
1 point
-
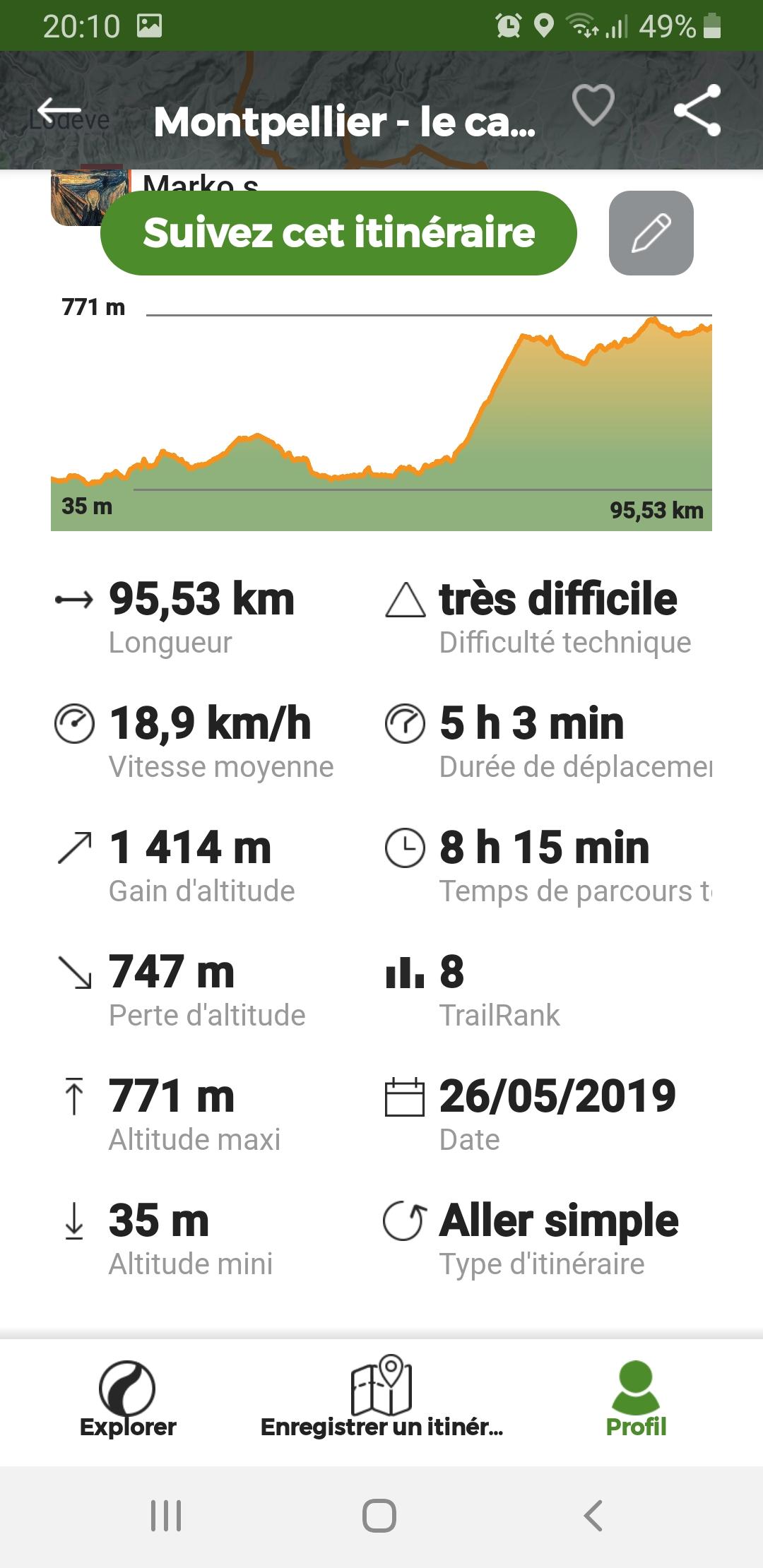
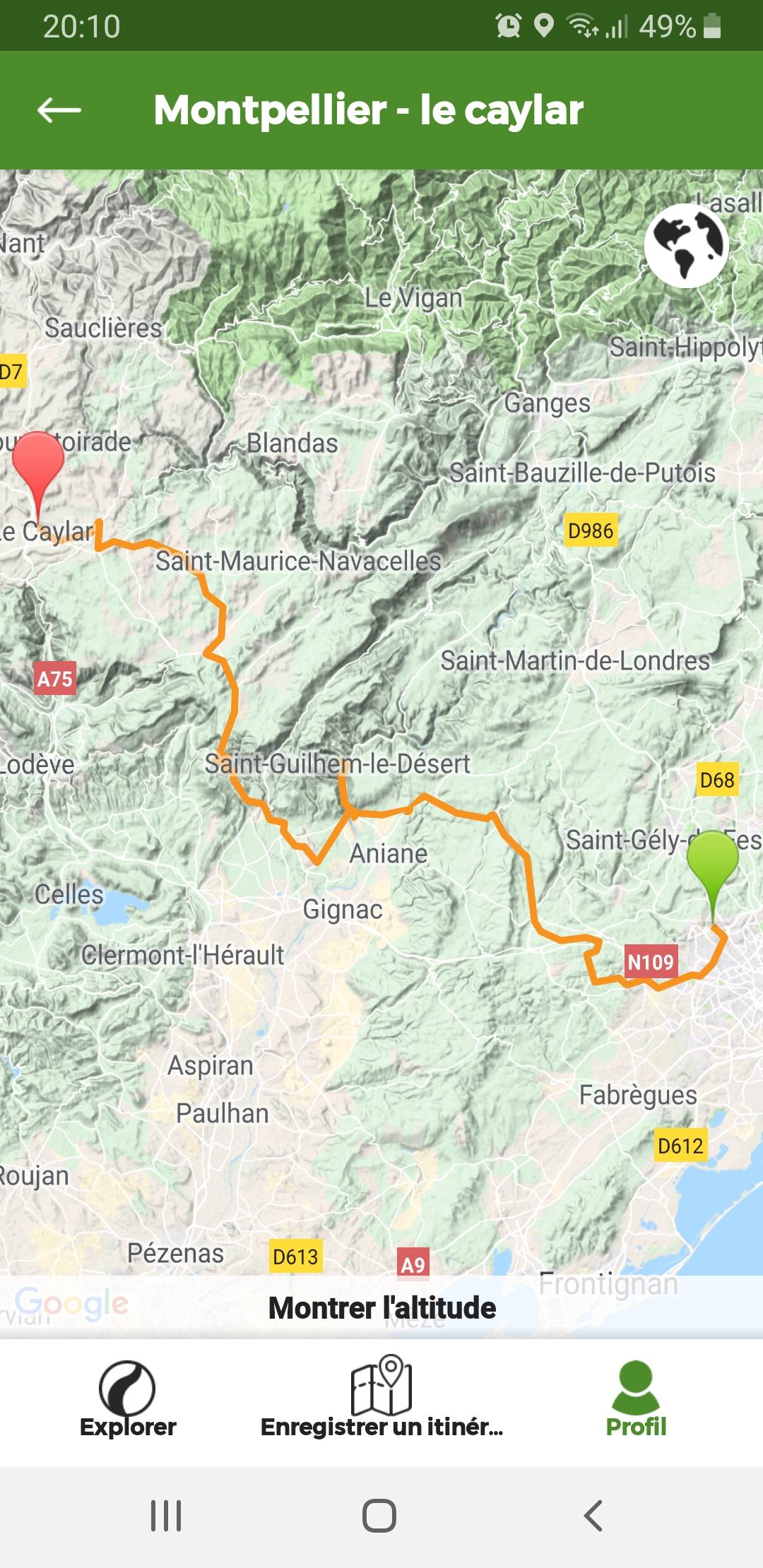
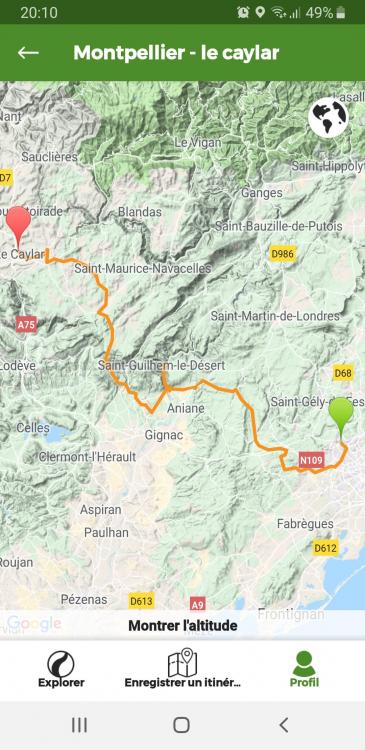
Bonne route . Vous êtes courageux ! Connaissant bien le secteur que vous avez emprunté entre Montpellier et le pont du diable et la vitesse à laquelle certaines voitures roulent... il y a de quoi se faire peur. Je reste admiratif sur ce genre d'aventures et merci pour le partage .1 point
-
Bon ride les gars, place au voyage maintenant. Septembre arrivera bien assez vite. Merci pour le lien cela fait rêver.1 point
-
Et c'est parti. Direction le larzac. Suivez-moi en direct sur Wikiloc! https://fr.wikiloc.com/live/3131352/WIG7QUI1 point
-
Salut comme tous forums, son premier message doit se trouver ici… https://www.espritroue.fr/forum/7-présentez-vous/ c ‘est plus sympa et ca fait parti des Regles ?… sinon on voit tres bien que la roue est noire mat a+1 point
-
1 point
-
1 pointNon non, même si je reconnais qu'une roue à beaucoup d'avantages, je ne le sens pas du tout, sinon je serais sur une roue depuis longtemps , sans entrer dans les détails, j'ai un petit soucis d'équilibre, voilà, je gère avec la trott. mais par prudence c'est ce qui ma fais prendre la décision d'arrêter la moto il y a quelques années1 point
-
1 point
-
1 pointÇa ne les avais pourtant pas gênés que les vélos soient silencieux. Le double standard envers la nouvelle mobilité est affligeant, je ne m’était pas rendu compte jusque là à quel points les gens sont reac’..1 point
-
1 pointDes fois, il n'y a pas de mention inutile...1 point
-
Merci minch et fabrice pour le soutiens.✌️ Pour le blouson blindé ben c est deja difficile d enfiler un simple pull ou un t-shirt sans se faire mal. Il me reste de la ferraille en poitrine les ligatures métallique pour refermer le sternum apres operation.ça il ne peuvent pas le retirer.et ça se resorbe pas. On vit avec. A tous et a toutes profitez bien de la vie de tout les jours.c est une chance inouïe d etre en bonne santé. Tant que vous n avez pas vecu un tel malheur comme celui ci c est difficile de comprendre . Merci a vous .a tres bientot.1 point
-
1 point
-
1 pointCe n'est pas mon but de te mettre le doute. Quand on pèse lourd, le freinage et la suspension c'est important pour ta sécurité et ton confort. Tu as des posts sur la zéro 8, 9, 10, 11 Envoyé de mon Mi MIX 2 en utilisant Tapatalk1 point
-
1 pointOui je la trouve génial , hier premier gros trajet 12km de piste cyclable . Que du bonheur Envoyé de mon iPhone en utilisant Tapatalk1 point
-
Ça avance !!!! Envoyé de mon Mi MIX 2 en utilisant Tapatalk1 point
-
1 point
-
1 point
-
Bravo, c'est courageux. Moi je suis passe par la case Tesla. Mais ce n'est pas plus mal. Merci pour ce retour encourageant.1 point
-
Franchement si je l’avait sous la main cette pièce je la monte direct.1 point
-
C'est aussi très lié au modèle de la roue elle-même, et je me suis aperçu de cela récemment en testant une MSuperX et une Monster... Moi qui croyais m'être forgé un genre de tachymètre cérébral/physiologique interne pour la wheel me calant grosso-modo à un 25 km/h de "vitesse de croisière", je me suis surpris à rouler "naturellement" tout pareil respectivement à 38 km/h et 45 km/h avec les deux roues citées, dans des conditions certes idéales (tarmac d'une piste d'aviation déserte). Attention donc, car les dégâts en cas de chute croissent de façon exponentielle, eux...1 point
-
Salut @X4V1 , je ne connais pas de tutorial vraiment clair sur le sujet, mais par exemple il y a quelques explications ici : https://www.youtube.com/watch?v=4OTtymYnFB0 Il existe plusieurs types de brushless, les plus simples sont monophasés et équipent les petits ventilateurs de PC... Il faut commuter l'excitation de l'inducteur (stator) en fonction de la position du rotor, une seule sonde de hall suffit, et on évite au rotor de s'arrêter dans la zone de transition à l'aide d'un petit shunt magnétique (un ventilo est toujours un peu cranté par construction afin de démarrer à coup sûr)). Nos moteurs sont triphasés, et la position du rotor est déterminée à l'aide de 3 sondes de hall décalées d'un tiers de pôle. L'excitation est créée à l'aide de trois demi-ponts de puissance (6 mosfets) qui connectent les phases 1, 2, 3 soit au + de l'alimentation, soit au -. Il y a un nombre d'électro-aimants multiple de 6 (stator), qui sont connectés dans l'ordre 1,2,3,1,2,3... Mais il y a un nombre différents d'aimants néodyme afin d'éviter un crantage magnétique, comme dans un moteur pas à pas. Le meilleur fonctionnement est obtenu à l'aide de signaux sinusoïdaux, et donc chaque phase reçoit un découpage à fréquence rapide de rapport cyclique variable (pwm) pour synthétiser des sinusoïdes. Le bloc logique qui contrôle tout ça peut modifier le courant et la fréquence en fonction de la position du rotor et du couple nécessaire, on parle de commande vectorielle. C'est assez compliqué, ce qu'il faut juste retenir c'est qu'on gère séparément le couple et la vitesse, afin de créer le champ tournant nécessaire. En jouant sur la phase de la commande, le système est réversible et un ordre de ralentissement oblige le contrôleur à absorber de l'énergie, qui est renvoyée aux batteries. A gauche un moteur de roue électrique Solowheel, on peut vérifier le nombre différents de bobinages et d'aimants, les trois sondes sont en haut, les cartes de commandes sont internes à la roue, c'est le seul constructeur qui fait ça.
 1 point
1 point -
1 pointBravo et MERCI à @Kingsong Europe (France) pour cette intervention efficace !1 point
-
1 pointHello tout le monde. J'ai été contacté ce matin par kingsong France. Ils ont bien compris mon désarroi... Il y a eu un quiproquo dans la gestion SAV de ma roue et celle d'un autre client selon eux. Par conséquent réparation de la roue à leurs frais et expédition chez mon revendeur début de semaine prochaine. Ouf ! C'est vrai que c'est dommage d'en arriver là. Je ne souhaite pas les 'basher' car une erreur peut arriver (d'autant plus lors d'un changement interne. Cf: Sous traitance chez Anovo). Donc je les remercie d'avoir pris en compte ma demande par mail d'hier soir (soit dit en passant très rapidement) et espère que ce cela ne se reproduise pas pour un client qui a utilisé sa roue de manière légitime. Donc pour moi c'est OK. À voir pour les prochains SAV des autres ? Merci à vous en tout cas pour vos conseils/soutien. ? !1 point