



Classement
-
Christian-91
Membre11Points4177Compteur de contenus -
Techos78
Membre9Points8233Compteur de contenus -

Centurion63
Membre6Points1475Compteur de contenus -

Le Dérangeant
Membre5Points2667Compteur de contenus



Contenu populaire
Affichage du contenu avec la meilleure réputation le 04/06/21 dans toutes les zones
-
3 points
-
3 pointsUn tireur d’élite entre chez son armurier pour acheter une nouvelle lunette de visée. Le gars lui présente un nouveau modèle super performant: Vous voyez la maison là-bas sur la colline à 3 km, c’est chez moi, utilisez la lunette vous y verrez comme si vous y étiez. Le tireur prend la lunette et confirme: – Ouais on voit super bien et je vois même un mec et une femme en train de rigoler au 1er étage. Le vendeur lui arrache la lunette des mains et regarde aussi et devient tout pale. Il ouvre un tiroir, en sort 2 balles et les tend au tireur. – Si vous mettez une balle dans la tête de ma femme et une dans la bite du mec, je vous offre la lunette. Le tireur reprend son observation de la maison et lui rend une balle en expliquant: – Si je tire tout de suite, une balle devrait suffire…3 points
-
3 points62% des trottistes sont des noirs et des arabes qui sentent mauvais et qui, sous l'emprise de la drogue, voleraient les sacs à main des petites vieilles avant de les violer. 83.8% des monoroulistes sont des combattants de dahesh poseurs de bombe, analphabètes et chauves d'un oeil. Ces torchons devraient être attaqués en justice, et leurs auteurs radiés de leur corporation de journalistes.3 points
-
3 points
-
2 points
-
Dans l'ordre : choc du tournevis --> décalage de coque --> bruit généré par le décalage. L'énergie de l'impact du tournevis est vraiment faible, mais elle est multipliée par le gain en boucle fermée de l'asservissement, ce gain est énorme. Cela passe bien sûr par différents filtres numériques PID , mais nos roues ont besoin d'une réponse immédiate (légèrement pondérée par le réglage de sensibilité). Donc, une réaction vive et pêchue même si la cause est rikiki. J'ai travaillé des décennies sur les boucles inertielles, et j'avoue être vraiment bluffé par la qualité des asservissements de e-roues. Une stabilité quasi inconditionnelle, à vide ou avec 120 kg (plus ou moins mous) dessus, c'est vraiment mais vraiment magique. J'aimerais voir les courbes de Black (Nichols) , Bode et Nyquist , ça doit être plutôt sympa...2 points
-
2 pointsC'est pas ce modèle la qu'on choisira pr la prendre ds le métro en tt cas... mais pour du off-road ça dois être jouissif 🍺🍺2 points
-
2 points
-
2 pointsJe crois qu'il faut pas se prendre la tête pour la température de la CM.. À priori la EX ou EX-N n'a pas de soucis de ce côté là, comme à pu en avoir la Nikola 1ère génération. À moins d'un usage hors du commun, le refroidissement fonctionne normalement.2 points
-
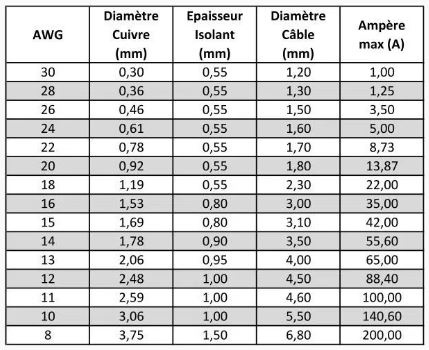
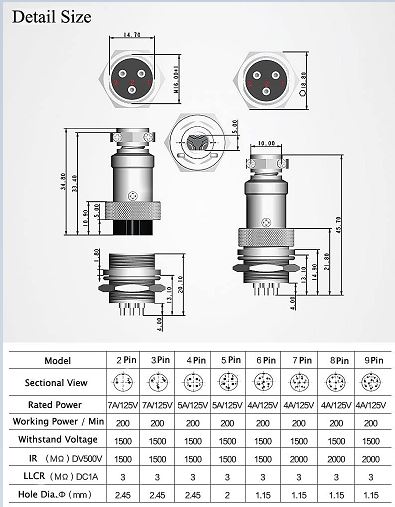
2 pointsJe vous trouve tous un peu négatifs, là... La ks16s est une 840 Wh 60V nominaux, la quantité de courant est donc 840 / 60 = 14 Ah. Il faut éviter de charger à plus de 0,5C , en conséquence les accus accepteraient un courant de 7 A sans souci... le fil aussi tient largement, c'est un awg18 : Le connecteur du port de charge GX16 tient tout juste 7 Ampères (version 3 broches) : La double diode schottky à l'entrée de chaque bms sont de 20A. Donc tu peux charger entre 5 et 7A sans problème, Pour info, j'ai pratiqué (en rando) des recharges 4A + 1,5A , à l'aide d'un appareil qui faisait le couplage et qui s'appelait CD2. Sauf exception exceptionnelle, Je charge la nuit, les chargeurs d'origine lents ne me gênent pas.

 2 points
2 points -
2 points
-
2 pointsUn très jeune wheeler viking sur la glace... bon sang, quel courage ! ! !2 points
-
2 pointsCe rire est vraiment communicatif ! 🤣🤣🤣🤣 AGREABLE JOURNÉE À TOUS !! 🤗 SVID_20210401_001247_1.mp42 points
-
Peut-être qu'en achetant en boutique, plutôt que sur le site Begode, ton vendeur pourra la débloquer ? Enfin moi je demanderai avant de faire le chèque 😉1 point
-
1 pointWow ! merci à tous, incroyable ce qu’ils vont sortir !!! Hâte de voir ça. Pour le moment, j’ai acheté le chargeur rapide à @Kokorun grâce au forum !1 point
-
1 pointC'est ce genre de bruit ? V_20210406_211442_OC0.mp4 Je pense que c'est le cache qui tape sur la glissière.1 point
-
1 point
-
@Techos78 Question étanchéité et vu que tu roule en V11, que pense tu de l'utilité voir de la nécessité protégé la sortie ventilo contre la pluie ? https://hulaj.market/en/inmotion-v11/145-improved-cooling-system-for-inmotion-v11.html @Techos78 Que pense tu également du garde boue de la V11 ? Sur toutes les version précédente c'est Nikel (v5,v8,v10) mais il ma semblé lire que là c'était pas fou... Je voulais commander les bumpers mais peut être que c'est … https://hulaj.market/en/inmotion-v11/144-a-set-of-bumpers-for-inmotion-v11-protecting-lamps-against-damage.html https://hulaj.market/en/inmotion-v11/149-a-set-of-lower-bumpers-for-inmotion-v11-protecting-the-lower-part-of-the-unicycle-housing.html Comme j'ai bien fait souffrir ma v10 je vais la vendre pour pièce avec 8500 km, je me penche sur les bones idées qui aiderait au maintiens en état de ma v11... Oui j'ai craqué et validé ma commande ce soir :p1 point
-
1 point
-
Je ne les connais pas, celles-ci, qui n'ont sans doute aucun rapport avec les courbes de Destiny Etiko et Luchy Donalds...?1 point
-
Je dirais même plus, autant prendre une 16X:(Trolley inside!1 point
-
1 pointL'auteur de l'article à charge se fait le porte-parole d'AXA Prévention, une association dépendante du groupe AXA, groupe international français spécialisé dans l'assurance depuis sa création, et dans la gestion d'actifs depuis 1994. Il semble que les utilisateurs d'EDPM ne sont pas les principaux clients des entreprises de ce groupe, qui a peut-être davantage flatté les propriétaires de jets privés par le passé. Mais peut-être son directeur Denis Duverne (président du club Europe Insurance CFO Forum) ne cracherait-il pas sur un coup de pouce du gouvernement en sa faveur pour récupérer des parts sur un marché prochainement lucratif ?1 point
-
1 pointTu devrais marquer humour pour ne pas être pris au pieds de la lettre, je dis ça, je ne dis riens1 point
-
1 pointElle peut parler d'alcoolémie Le Negroni est un cocktail à base de gin, de vermouth rouge et de Campari. Il a été inventé à Florence (Italie) en 19191. https://fr.wikipedia.org/wiki/Negroni_(cocktail)1 point
-
1 pointArticle risible... 45% des usagers de trottinettes utiliseraient leur trott après avoir fumé du cannabis ! Les chiffres avancés ne sont même pas crédibles.1 point
-
1 pointAh ok... Je pensais que justement on était sur un forum pour discuter, échanger des points de vue et éventuellement être convaincu par des plus expérimentés que nous ! Désolé si je t'ai froissé.. Bonne journée1 point
-
En même temps que le bruit, il y a un petit soubresaut de la roue, aussi, non ? Et vous arrivez à provoquer ça juste en tapotant gentiment ici ou là avec un petit tournevis? Je pose la question car je ne connaissais pas ce phénomène plutôt zarbi, et surtout parce que ce soubresaut ressemble tout à fait (en plus léger!) à ceux beaucoup plus prononcés qui m'avaient rendu la roue quasiment inutilisable à la fin 2020, et jusqu'à ce que cela disparaisse pratiquement totalement, à la suite d'un réglage de parallélisme/alignement qu'a bien voulu me faire @Erwanrcx1 point
-
Dans la vidéo, l'élément important n'est pas le bruit, mais le décalage de la position de coque. Le bruit est une conséquence, lié à du jeu dans la cinématique car le décalage est hyper-rapide et la roue n'a pas de pilote à entraîner. L'asservissement d'une roue est numérique, lorsqu'une rotation angulaire est détectée (déséquilibre), la puissance crée un incrément de variation de vitesse de moteur. A l'arrêt le long d'un poteau, un wheeler peut éventuellement ressentir un petit fourmillement car la roue cherche en permanence son équilibre. Si on reste en deçà du seuil de détection, le champ tournant du moteur est immobile, si non il y a des rafales de poussé-tiré, que l'on appelle le cycle limite. Le test de la vidéo est relativement "méchant" : le choc crée une impulsion de rotation qui est détectée par le gyromètre de tangage, qui lance immédiatement la cavalerie (le gyro gère la boucle rapide, bande passante probable environ 20 Hz), d'où rotation du pneu. Le choc est très court, mais même s'il se termine il n'est pas évident que cela annule le passage du seuil. A priori, le décalage physique semble se conserver, il n'est pas impossible que la boucle lente accélérométrique recale tout ou partie du décalage au bout ... d'un certain temps. Tout cela est anecdotique, la s18 marche bien et c'est plutôt une mauvaise idée de créer des chocs pour faire réagir les capteurs. Ceci dit, la manipe n'est pas dangereuse, simplement elle est inutile.1 point
-
1 point
-
1 pointSalut steph31 je t'ai mis un emoji confus pour ta "petite histoire" et un autre qui souri pour la photo de ta pédale cassé car je pense que le mieux est de le prendre à la rigolade et c'est d'ailleurs ce que tu fais sur la fin de ton contenu Wouah.. les rues pavés ! toutes mon enfance.. en été les voies de ce type là car il s'agit d'une voie si je ne m'abuse il Y'a bien une ligne de chemin de fer sur la droite ! l'avantage c'est qu'elles dégagent une certaine atmosphère, un charme indéniable 🙄 Et faire le trajet aller retour pour le boulot demande un minimum d'attentions n'est ce pas @King Size1 point
-
1 point
-
1 pointChez moi il ne bouge pas ce capuchon de valve officiel - dommage juste qu'il soit rouge au lieu d'orange qui est la couleur de la marque Inmotion. Si vraiment il glisse tant que ça un simple tour sur la valve avec du ruban teflon de plomberie suffira à le sécuriser.1 point
-
1 pointLa place du carenage est plutôt réduit par rapport a la roue elle-même. Ce qui prouve que ce serait une vraie 20 pouces. Donc cette S20 risque d'être ENORME, ca pourrait être la nouvelle Monster de chez Kingsong.1 point
-
1 pointEnfin ! C’est la BatWheel !! le design est un étrange mais plaisant hybride entre une Z10, une S18 et une 16X. J’aime pas mal je dois dire ! Si c’est pas un fake ça promet du lourd. qu’ils enlèvent juste l’horrible OverWheel pour le remplacer par le symbole du Batman et ce sera top ! 😊1 point
-
1 point
-
1 pointDangereux... S'ils touchent, c'est le pas-de-vis de la valve de l'amortisseur qui morfle. Le plus gros avantage du bouchon de meuble est qu'il protège sans être relié à ce qu'il doit protéger : Il n'y a donc pas de vice (même à faire sauter le bouchon!).1 point
-
1 point
-
1 pointLe design est vraiment cool ! A quand une roue suspendue à 20/21 Kg pour remplacer ma V10F ? 😍1 point
-
1 point
-
Ben je dirais non, ta batterie chargée à 100% monte à 67.2V ça passe mais de mon point de vue la marge de sécurité n'est pas suffisante, et 5/6A ça ne chauffera pas1 point
-
1 point@Syoäni a répondu, mais juste pour le plaisir, j'en rajoute un peu, en parlant de physique. Quand on tombe, on devient un objet balistique, c'est à dire qu'on est (momentanément) en apesanteur. Il y a deux sous ensembles liés mécaniquement : -1- l'ensemble selle+pédales+pilote -2- et l'ensemble pneu+moteur+batterie On a 1 et 2 qui tendent à s'écarter à cause de la chambre positive. Si la chute est plus haute que le sag , on atteint la butée avant que le pneu touche le sol, donc, effectivement, clack.1 point
-
1 pointCes pedales sont des anciens modele connu pour etre fragile. Les nouvelles pedale v8f et v10 ont un grip dessus,et sont dans une autre matière.1 point
-
1 pointBon je me suis encore mît dans les frais pour avoir des masques digne de ma roues c est commandé ils ont l air trop cool merci @GyroRideRz1 point
-
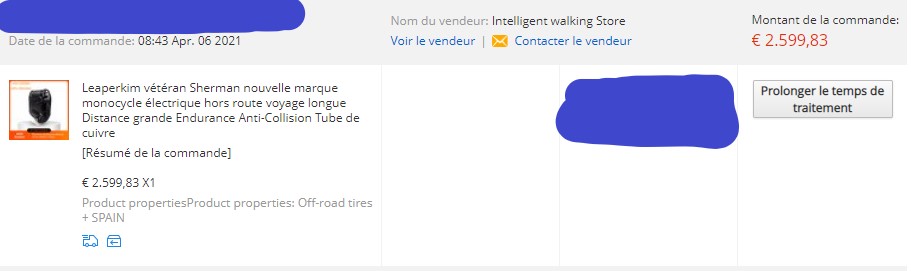
1 point1 pointJe vous fais suivre la suite de mon délire de totale autonomie en déplacement avec ma roue. Elle est désormais équipée d'un gx-16 supplémentaire, directement relié à la batterie, afin de fournir du 12 v via un transfo qui délivre jusqu'à 120w , avec une puissance suffisante pour charger simultanément mon ordi, mon téléphone, mon chargeur de cellules li-ion ( pour ma clope électronique), le tout en charge rapide compatible USB c power delivery. A priori ça fonctionne bien, j'ai pu bosser toute une journée dans mon hamac sans voir une seule barre de la Sherman descendre ( ça consomme beaucoup le dev que je fais) donc je suis assez content de l'autonomie de ma powerbank 😏 Il manque plus qu'on ait le droit de sortir a plus de 10km. Quoique si je leur dis que j'habite dans la forêt 😅



 1 pointBonjour, je confirme que la solution retenue par Lionel37 est assez ingénieuse. A première vue, on ne voit pas les subtilités du mécanisme. Au final, il a obtenu un résultat efficace, léger et économique. Je garde un très bon souvenir de cette rencontre (on retient notre respiration sur la photo).
1 pointBonjour, je confirme que la solution retenue par Lionel37 est assez ingénieuse. A première vue, on ne voit pas les subtilités du mécanisme. Au final, il a obtenu un résultat efficace, léger et économique. Je garde un très bon souvenir de cette rencontre (on retient notre respiration sur la photo). 1 point1 point1 pointFranche rigolade du 2 avril ! Prétendre passer 600 Ampères dans cette connexion, c'est, comment dire, pas fameux mais fumeux (Là c'est la Source, la Gate à gauche, le Drain au milieu)
1 point1 point1 pointFranche rigolade du 2 avril ! Prétendre passer 600 Ampères dans cette connexion, c'est, comment dire, pas fameux mais fumeux (Là c'est la Source, la Gate à gauche, le Drain au milieu) 1 point1 pointSans oublier 1100 km/h sur nous même et 1600 km/h pour ceux qui habitent l'équateur.1 point
1 point1 pointSans oublier 1100 km/h sur nous même et 1600 km/h pour ceux qui habitent l'équateur.1 point































Information importante
Nous avons placé des cookies sur votre appareil pour aider à améliorer ce site. Vous pouvez choisir d’ajuster vos paramètres de cookie, sinon nous supposerons que vous êtes d’accord pour continuer.