



Techos78
Membre
-
Inscription
-
Dernière visite
Tout ce qui a été posté par Techos78
-
 Un petit désassemblage : Cette roue est lourde parce qu'il y a beaucoup de vis...
Un petit désassemblage : Cette roue est lourde parce qu'il y a beaucoup de vis... -
Oui, c'est un monstrueux scandale qui n'a pas été suffisamment mis en exergue sur ce fofo. Sur V12, il est absolument impératif de changer les cartes équipées de MosFETS Infineon IPP023N10N5 100V.
-
Tu poses le doigt sur les critères "désagréables", car pour le reste, cette roue très gadgétisée s'en sort bien, tous les essayeurs l'ont bien accueillie. Bon, pour les 1500Wh, c'est plutôt léger quand on aimerait rouler 4 heures peinard. C'est dû à la tension 84Vmax, sous forme de 2 packs 20s2p... épicétou. Ceci dit, cette "petite" tension est suffisante pour un bon comportement dynamique, les hautes tensions ne sont nécessaires que pour rouler au dessus de 60 km/h. Pour les démarrages canon, c'est le couple qui dimensionne, pas la tension. Ouais, 35 kg, c'est beaucoup, surtout pour une "simple" 17 pouces ( 5 kg de + qu'une v11 !). C'est fatalement dû à la suspatte fourche, bôôcoup plus saine et performante que la v11... Le wheeling devient élitiste, pilote avec muscles poreux s'abstenir... On peut espérer que la masse apporte confort et stabilité, cela reste à démontrer. J'ajoute le critère prix. Donc 3 ou 400€ de + qu'une v11y, mais plein de goodies en rab (afficheur, les pads, la localisation...). Perso, si je casse ma tirelire, cette roue est en top liste, mais je ne me précipite pas.
-
Les écureuils s'amusent :
-
et des Petit-Gris .
-
C'était un problème sur les vieilles roues dû à la calibration roulis+tangage par le client, la procédure nécessitait de positionner physiquement la roue. Dans ce cas, si on calibrait avec la roue penchée sur le côté, un angle parasite perturbait le calcul de verticalité lors d'une rotation en cap. Sur une roue récente, la cm est calibrée en usine (pour débiaiser les capteurs accéléro), le client ajuste ses pédales simplement en programmant un angle. Hypothèse : la cm est mal calibrée et subit un piqué/cabré fugitif proportionné à la vitesse et au signe de la rotation en cap.
-
Entretenir une roue c'est avant tout : -- la nettoyer et vérifier l'absence d'humidité. -- contrôler les pièces d'usure, et les fissures ou impacts un peu partout. Le nettoyage le plus critique, pour les roues très carénées, c'est retirer la croûte de boue séchée qui se dépose au fond du passage de roue, car souvent on y trouve aussi le dissipateur de la carte mère. On en profite pour scruter le pneu qui peut comporter des bouts de verre, écailles de silex, épines... Le reste c'est surtout pour faire joli. En gros, il n'y a pas de pièce d'usure sur une roue rigide, par contre une roue suspendue nécessite une attention particulière afin de maintenir une fonctionnalité orgasmique. Les pièces d'usure incontournables : le pneu (~ 15000 km), les roulements (~ 30000 km). Mon avis : une roue qui a bien roulé est une roue fiabilisée, pas question de la désosser juste pour se faire plaisir.
-
Je ne comprends pas comment on peut régler une suspatte en faisant l'impasse sur la valeur du sag , en se contentant de titiller un peu tout pour aboutir a un "ok pour moi". Ca manque de rigueur. Bien sûr, mesurer le sag (l'enfoncement statique en charge exprimé en % du débattement) est un peu compliqué car il faut bidouiller une échelle graduée... On peut choisir ce sag en fonction du type de parcours (gros sauts...) et aussi de la linéarité de la suspension. Perso, je vise souvent 25%.
-
Recyclage indispensable mais procédures critiques, a priori on a des progrès à faire : Pour l'anecdote, le tokamak ITER qui consomme du tritium (trèèès rare) pourra (?) recréer ce tritium à l'aide de générateurs utilisant une grande quantité de lithium, donc à proximité d'un plasma à 150 000 000 de degrés. .
-
Amusant : 1099€, tu es un des seuls à pratiquer un prix "de marchant de godasses", ouf, tu nous épargnes les 95 centimes. . Sans rancune, bonne vente.
-
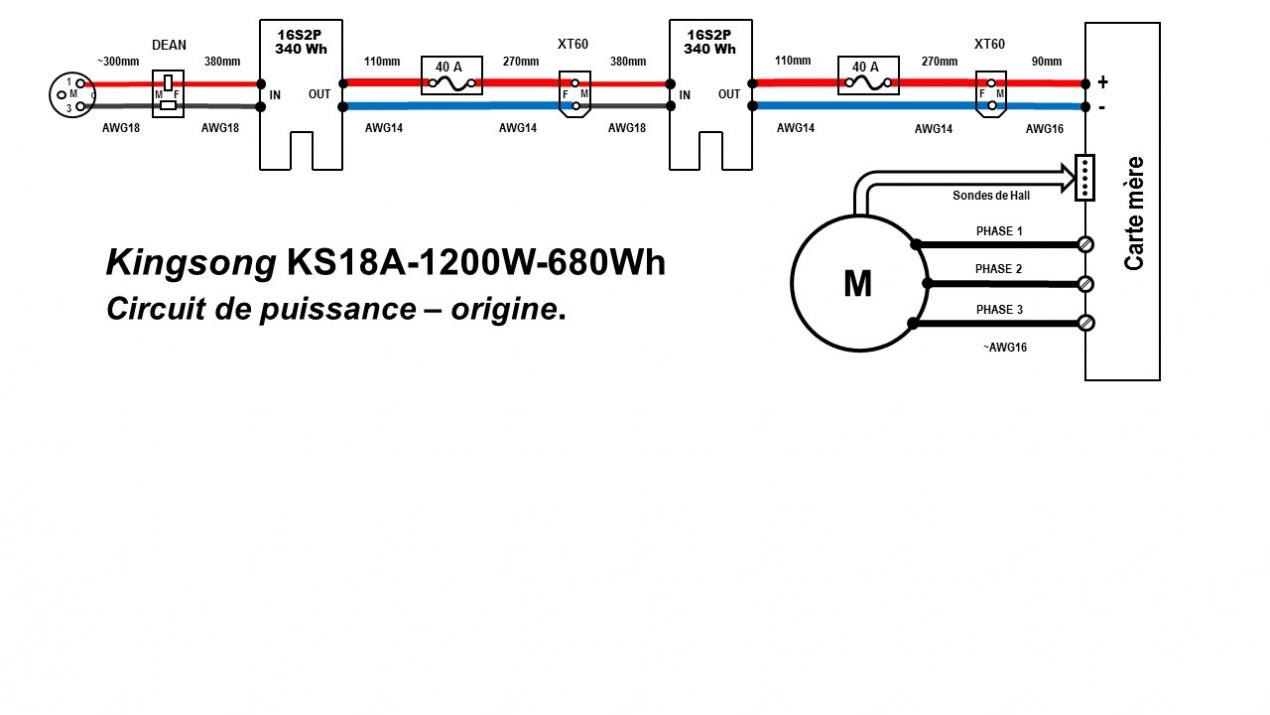
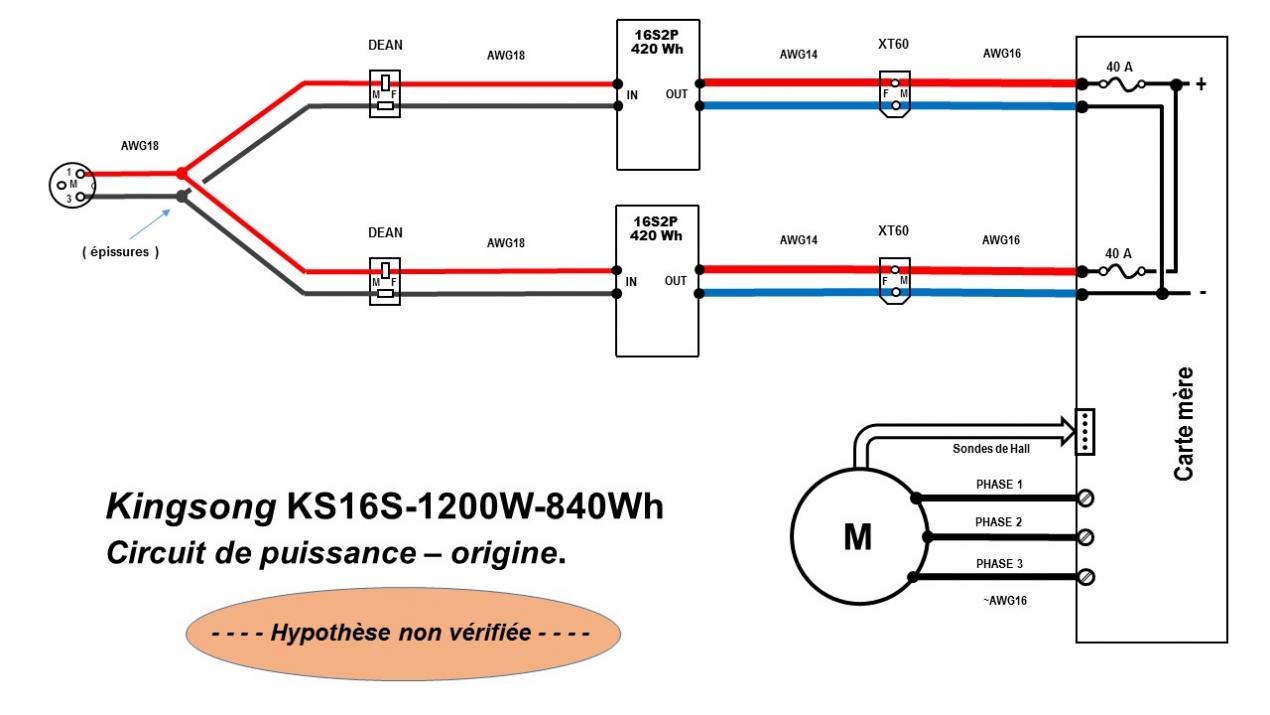
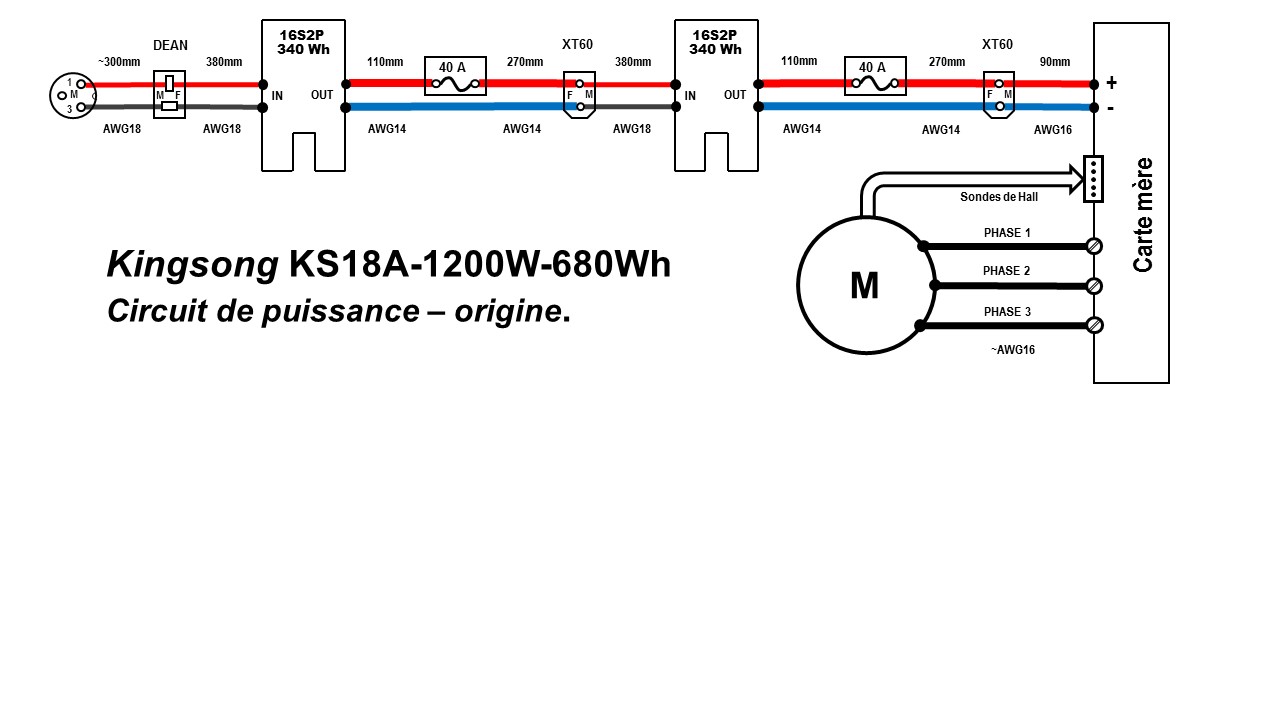
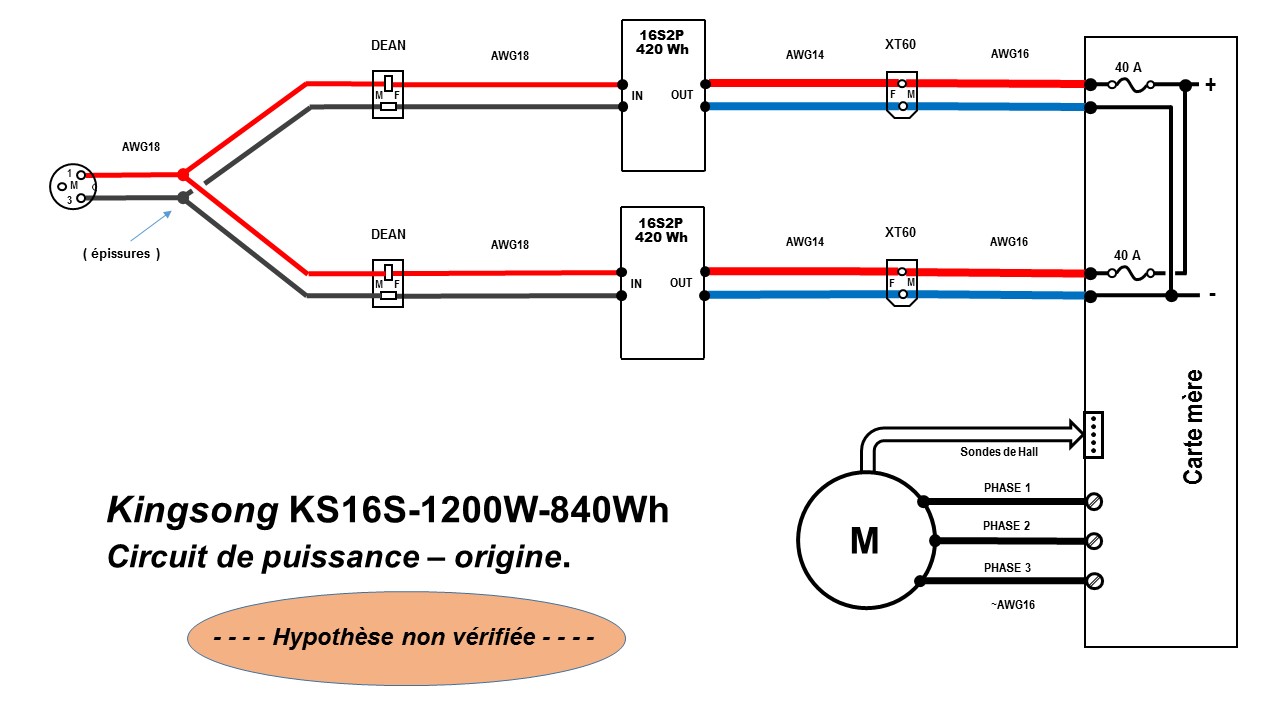
Désolé, ma réponse va être longue. A l'époque, ks utilisait des packs 16s2p équipés avec des cellules 18650 de capacité moyenne (~2800mAh) ou haute (~3500mAh), ce qui donnait à peu près respectivement (pour 60Vnom) 340 ou 420 Wh. Donc tu peux gagner en autonomie avec les hautes capacités. Il y a éventuellement un gag (à vérifier) : sur ces "vieilles" roues, ks pratiquait un branchement fantaisiste : les packs en cascade. Par exemple, ma ks18a : Probable que la 14c n'a qu'un fusible, au niveau de la carte mère, mais on voit que les packs n'ont pas les mêmes connecteurs, il faut donc une paire de packs kivabien ou bien un bon fer à souder. Par ailleurs, chaque pack étant muni d'une diode anti-retour sur son entrée, l'énergie de régénération ne peut pas remonter jusqu'au pack de tête. Bon c'est un peu anecdotique, sauf si tu habites en montagne. A partir de la ks16s ks a adopté un montage // , moins bizarre, comme par exemple : Dans tous les cas, avant de les connecter ensemble, il faut que les packs soient chargés à une tension quasi égale, à moins de 1V près. Si tu es bricoleur, je te conseille ce second montage, plus sain, mais qui oblige à créer une épissure côté port de charge, et une arrivée double côté cm.
-
Le + simple : tu lances YouTube, tu tapes "ks16x trolley" dans le champ de recherche, et tu gagnes quelques heures de vidéos gratuites (+ pub). Bon, ks est (il me semble) le seul a avoir une poignée télescopique qui sert de trolley et de poignée de transport, + ou - en biais donc équilibrée. Plusieurs modèles de roues sont basées là-dessus, elles se ressemblent beaucoup. Il faut déposer les coques externes, clipsées/vissées...etc. Ce n'est pas bien méchant. Les pièces détachées coûtent la peau des fesses : ex chez Amazon .

-
Voilà un pur souci mécanique. Il y a un des plots de verrouillage qui est décalé, ou bien le système de libération qui est déréglé. Pas de miracle : démontage, analyse puis action corrective. Il faut un niveau de bricolage intermédiaire. Ce qui est certain, ne pas soulever la roue si la poignée est mal verrouillée, cela va tout péter.
-
+1. Étant (comme tout le monde) sujet à l'obsolescence programmée, j'admets regarder favorablement cette Zosh, lorsque faire le kéké sur une e-roue ne sera plus d'actualité. Le bi-moteur suspendu est sympa, attention il y a 2 modèles, un long et un court, seul ce dernier est homologué (<1,65m). Ce n'est d'ailleurs plus franchement une trott car l'amortisseur sépare de deck, donc les pieds sont "fixes" comme sur une draisienne. Ouch, selle, porte bagages, antivol plombent le tarif stratosphérique... 5k€ est insuffisant...
... en démontant éventuellement l'obus pour accélérer le processus. C'est d'ailleurs une bonne habitude de le changer, surtout s'il y a eu du préventif dans la chambre.
J'ai suivi plusieurs fois une habilitation basse tension non dédiée aux véhicules : perte de temps. Voilà un résumé rapide : démerdez vous pour éviter de faire passer plus de 10mA dans votre corps, particulièrement entre les deux bras (trajet du cœur). C'est d'autant plus facile en DC pour lequel il n'y a pas de crispation musculaire. En plus, dans nos engins, il n'y a pas de "masse", c'est à dire de mise au châssis d'un pôle batterie, donc pour prendre la bourre, il faut vraiment le faire exprès... Il est possible que cette NFC18550 donne quelques infos spécifiques, autre que "il faut que quelqu'un surveille", donc si un volontaire à de l'argent et du temps en trop, il pourra nous en parler. J'ai quand même un doute, ces formations détaillent des procédures pour minimiser les risques de dégâts corporels, les dégâts matériels (incendies, explosions...) sont en principe hors sujet.
Même les drones civils peuvent être dangereux :
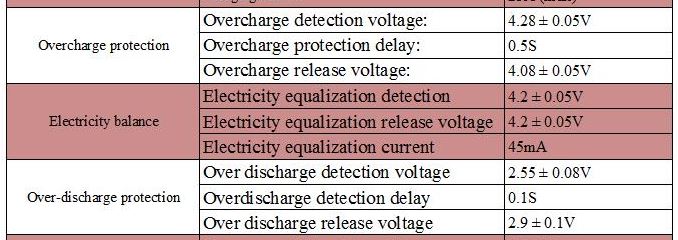
En effet, l'équilibrage semble calamiteux. L'élément "bizarre", c'est qu'il y a au moins une cellule qui a atteint 4,2V, c'est d'ailleurs la plus "mauvaise", car toutes les cellules se chargeant au même courant, c'est celle qui est montée le plus vite. Hypothèse : cela donne l'impression que l'équilibrage a cessé à cause de cela (?), car maintenant, avec les bms "intelligents", on peut s'attendre à tout, sachant qu'il y a un mosfet pour interrompre la charge/l'équilibrage, éventuellement piloté aussi pour équilibrer les deux packs entre-eux. Sur les pack anciens, il y avait effectivement une sécurité ultime, avec hystérésis, mais à une tension plus élevée de 4,28V. On se trouve fatalement désarmés devant tant d'intelligence non documentée...
 Comment dire...
Ce qui m'étonne, c'est, qu'au prix où est la peinture, il y a toujours des zozos qui gribouillent partout... Oups, je me trompe, ce sont des "artistes de rue"... si si...
Bizarre, le pneu très large de la z10 étant particulièrement sensible au dévers, les routes bombées obligent à faire l'inverse. Pour l'inclinaison à gauche, il faut une pente à gauche ce qui n'est pas courant : Mais rien n’empêche au pilote de rester déhanché... une mauvaise habitude, ou bien une position volontaire pour lutter contre un début de wobble.
Comment dire...
Ce qui m'étonne, c'est, qu'au prix où est la peinture, il y a toujours des zozos qui gribouillent partout... Oups, je me trompe, ce sont des "artistes de rue"... si si...
Bizarre, le pneu très large de la z10 étant particulièrement sensible au dévers, les routes bombées obligent à faire l'inverse. Pour l'inclinaison à gauche, il faut une pente à gauche ce qui n'est pas courant : Mais rien n’empêche au pilote de rester déhanché... une mauvaise habitude, ou bien une position volontaire pour lutter contre un début de wobble. Moi j'utilise plutôt l'expression "casse-couilles".
Ouille, j'ose espérer que c'est configurable, car c'est très désagréable... Par hasard, est-ce le paramètre "SoundWave" ?
Moi j'utilise plutôt l'expression "casse-couilles".
Ouille, j'ose espérer que c'est configurable, car c'est très désagréable... Par hasard, est-ce le paramètre "SoundWave" ? Autogire, un engin mal connu. Quelques infos ICI.
Autogire, un engin mal connu. Quelques infos ICI.




Information importante
Nous avons placé des cookies sur votre appareil pour aider à améliorer ce site. Vous pouvez choisir d’ajuster vos paramètres de cookie, sinon nous supposerons que vous êtes d’accord pour continuer.