Classement





Contenu populaire
Affichage du contenu avec la meilleure réputation le 02/18/19 dans Messages
-
Une piste cyclable de près de 50 kms avec un décor magnifique aux alentours de Troyes. Voilà ou j aime rouler avec mes amis .3 points
-
3 pointset c'est la que les transistors de puissance font PSCCccccccchhhhhhhhhheeeeeeeeeeee.................3 points
-
2 pointsSi vous avez des plans d'artisans proposant de l'usinage, ça m’intéresse! Et j'espère que je ne serais pas le seul. J'ai déjà fait des demandes via "l'usineur" et protolabs, pour des pièces différentes. Tarifs élevés, même si je comprends qu'un artisan doit bien facturer le temps qu'il y passe. Je n'ai pas écumé le web pour trouver d'autres offres, ça me donnait déjà une bonne idée. Dans un autre domaine, j'ai quand même commandé des pièces en impression 3D (frittage sélectif par laser pour être précis) chez protolabs, j'avoue que j'ai été bien reçu et bien suivi, et le rendu n'a rien a voir avec ce que j'ai pu produire moi même. J'ai du coup interrogé l'autre bout du monde, suite à un post sur ce forum. Je vais passer commande, le devis protolabs pour les deux pièces était à 485 et 195 € ht... J'ai un devis à 46 et 26 € en Chine. A voir s'il y aura des taxes en plus (DHL) Je vous ferais un retour après réception. Je ne pense pas qu'on pourra trouver moins cher, mais si vous avez des suggestions je suis preneur!2 points
-
2 pointsje suis bien de ton avis sevy, c'est justement ça qui est sympa dans ces machines, on peu s'amuser à moindre frais2 points
-
2 points
-
2 points
-
2 pointsBon je viens de trouver mes flasques, et je viens de comprendre. J’ai mal lu ta demande, désolé. J’ai les premières versions des V2, ils ont changé le rebord par la suite, mais les deux versions sont compatibles. D’ou dans ma tête V1/V2... Mais toi tu veux des vraies V1... Et ça j’ai pas... Sorry2 points
-
2 pointsj'espère que ça vaudra le coup et qu'ils vont sortir une vraie concurrente aux Ultra et Thunder.....2 points
-
2 pointsMerci @Techos78 de ta participation, oui, tomber debout, faut le faire... ça m'arrive souvent ce genre de choses, j'ai la bougeotte en roue ? Je remercie tout le monde pour leur participation, et désolé de ne pas vous avoir accompagnés jusqu'au bout, ma roue sonnait à l'arrêt, ce qui était assez insupportable en transport en commun... C'était quand même classe d'avoir eu un étage complet dédié à la charge ?. Voici quelques clichés:


 2 points
2 points -
2 pointsHo bah j'ai hâte qu'elle soit certifiée alors on pourra shooter les gosses en toute sécurité... Pffff n'importe quoi vos délires CE pas CE c'est celui qui est sur la roue qui devrait être certifié CE ... Réfléchissez un peu2 points
-
1 pointSalut à tous , je débarque avec la speedeway mini 4 pro sur EspritRoue, je dis adieu à la ETWOW bien que je conserve une chinoise Elle est LA belle bête, j'ai fait 10 mètres dans le couloir Dés que je peux essai sur route. Là elle se recharge tranquille et je lui fais un contrôle général Je vais de ce pas consulter la FAQ de @Koxx que je salut au passage
 1 point
1 point -
1 pointDes potes m'avaient fait ça sur mon Solex 3800, il avait une super Patate j'te dis pas @JJK j'suis sur que j'grattais une Raptor au démarrage, lol mdr ?????1 point
-
1 pointPour la vis j'ai vue ça oui ... ca fait peur.... heureusement pour lui ce n'était pas en pleine accélération !1 point
-
1 pointça me fait penser à l'ether qu'on mettait dans le réservoir de nos mobs.....des avions supersoniques les trapanelles ....mais ça durait pas longtemps ...1 point
-
1 pointMerci sonkenn j’ai trouvé ils arrivent de chine plus qu a être patient Envoyé de mon iPhone en utilisant Tapatalk1 point
-
@Yotraxx, Je pense que tu peux tenter de redresser aussi, de toute façon, tenter et avoir une chance de réparer avant de partir à la poubelle, il n’y a pas photos. Moi, j’utilise souvent des Chasse-Goupilles de gros diamètre pour ce genre de travaux. Ça permet de bien cibler le point d’impact où tu va taper et si tu places correctement la surface du chasse-goupille, ça ne fait pas de traces. Opération déjà faite sur une Ninebot E+ Pour l’assurance, je pense que tu peux oublier. @Ayorosknight a eu la même mésaventure en tesla et les services de la ville de Paris, qui ont pour fonction de gérer l'état des routes, lui ont répondu qu’en l’état actuel, il n’a pas le droit de rouler sur la route.... Donc, il a dû assumer seul le remplacement de son moteur... Pour en revenir à la réparation, tu peux tenter de redresser à minima la jante et améliorer l’étanchéité pneu/jante avec les produits pour rendre étanche les tubeless de vélo : Notubes Liquide pour réparation https://www.amazon.fr/dp/B000XSJIMA/ref=cm_sw_r_cp_apip_koonSMLFklEEe ce produit est très efficace et ce qui compte, c’est pouvoir rouler...1 point
-
1 point
-
1 pointcertains ont l'air d'avoir fait la manip sur les forums russes : https://translate.google.com/translate?hl=&sl=ru&tl=fr&u=https%3A%2F%2Felectrotransport.ru%2Fussr%2Findex.php%3Ftopic%3D52365.666%23topmsg traduction : Quand j'ai eu un halten là-bas, le même contrôle que pour 48 volts, je l'ai bricolé en 2 étapes. La première étape de 25 à 30 était normale, puis j'ai décidé d'atteindre environ 35A, le pouvoir de l'enfer était. Après 200 km il a brûlé1 point
-
1 pointVous pouvez aussi consulter ce vendeur : Wheel tech Store https://s.click.aliexpress.com/e/bjGJB4hL lui demander par MP ce qu’il vous propose, pareil, posez lui la question de la part du Forum Esprit Roue et d’Erwan1 point
-
Voici le lien : https://www.gyroriderz.com/blogs/le-blog/ninebot-z10les-differences-entre-le-firmware-1-0-0-et-le-1-0-51 point
-
1 pointSuper, Merci m'sieur. Lorsque je l'ai reçue, j'ai déjà eu l'agréable surprise d'avoir le trolley noir et le garde-boue version 2 ?. C'est visiblement de série sur les L autant que les XL.1 point
-
UN chanel youtube au nom de Pan Kylin mais je crois pas que c'est de KwK il me fait penser a un gars qui avait fait une video detailee de soit le X10 ou la kugoo ... en tous cas une video assez detaillee et je dois dire assez nuancee de la WW2 .. avec la premiere explication que j'ai vue sur le fonctionnement du system pseudo abs ... grosso modo ca force le moteur a tourner ce qui donne credence aux theories que c'est vraiment pas bon pour le matos.1 point
-
1 point
-
Merci de mener l’enquête dans la vraie vie@fremalea !! j’apprécie grandement !! Je tenterai pour sûr l’option étant de toute manière forcé de retirer jante et pneu de l’ensemble, j’irai franchement au décapeur. C’est une bonne option1 point
-
Je viens de demander à un collègue, je lui ai montré la photo. Si la jante est en alu, tu peux chauffer la jante à l'aide d'un sèche cheveux ou un décapeur thermique (attention à ne pas faire fondre le pneu). Cela ramollira l'alu et facilitera grandement l'opération. Ensuite un bout de bois posé sur sur la déformation et un bon coup bien placé au maillet ou marteau. 1 chance sur 2, l'aluminium peut se fissurer (d'où faire chauffer), mais je pense que cela se tente.1 point
-
Ah oui j'ai entendu parler des ces problèmes....visiblement récurrents chez cette marque...sans vouloir faire de sectarisme ! Si tu n'as fait que 20km, tu ne dois pas être encore tout à fait à l'aise (comme je te comprends), je peux t'assurer qu'au fil des km tu vas prendre un pied monstre.1 point
-
1 pointPrends quand même le temps d'être plus à l'aise pour aller sur les pistes cyclables. Il s'y passe des tas de choses qu'on n'imagine pas forcément sauf si tu utilises déjà les pistes cyclables en vélo ou roller ou trottinette (puisque je vois que tu as une trottinette)... En tout cas, ça a l'air de prendre visiblement... Bonne continuation.1 point
-
1 pointMerci pour cette superbe rando, j'ai fait 20 km avec vous et c'était bien fun. Vidéo en préparation hihi.1 point
-
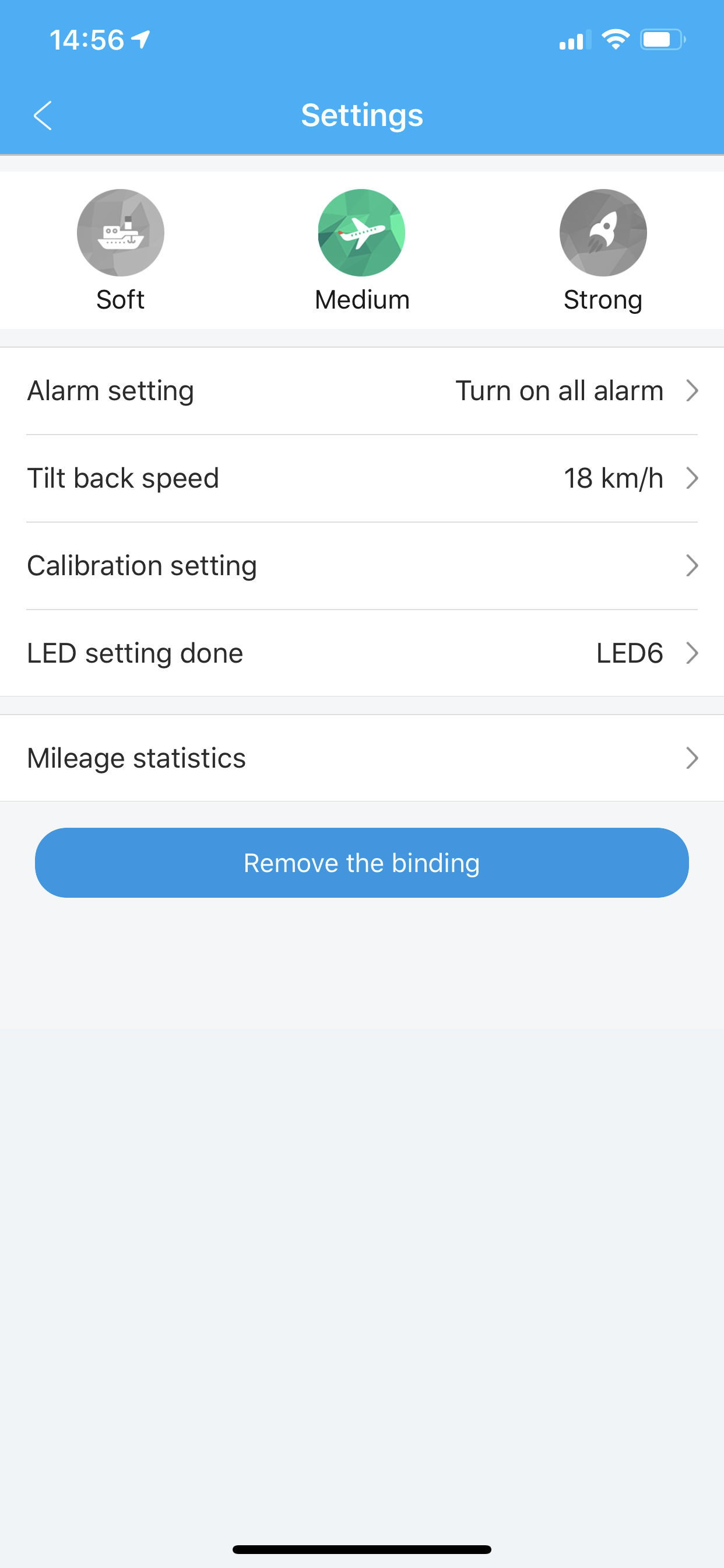
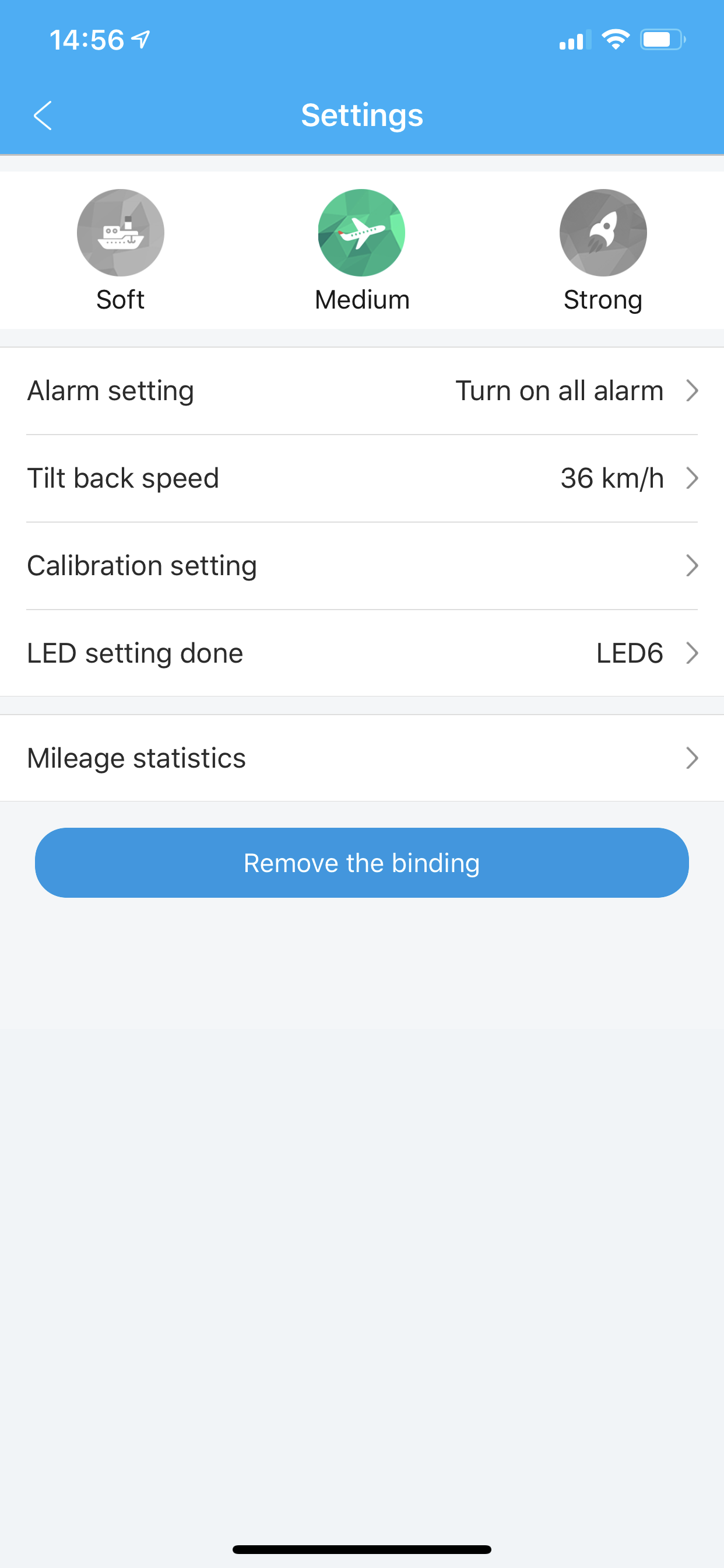
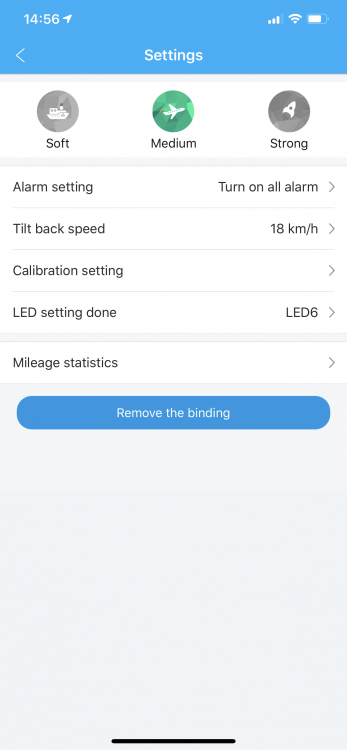
1 pointENFIN!!!!!!! J’ai trouvé l’explication!!!!!! Je résume, j’avais 2 applications, j’ai récupérai la dernière de gotway la même qu’en imagine mais avec le fond blanc au lieu de celui de la photo. J’ai effacé celle en photo car elle se fermait quand j’allais dans les paramètres avec mon iPhone X, en l’effaçant ça a gardé ou modifié ce tilt back à 18km/h (voir photo) un réglage que je n´ai jamais touché auparavant!!!! Il a tjrs été sur 36km/h (voir photo) comme sur la photo, donc dès que j’entendais sonné, je ralentissais et le tilt back n’avait pas même temps de s’effectuer ou très peu mais je ne ressentais pas dans la conduite. Moralité, ne pas avoir plusieurs applications pour gyroroue; gardez en une en vérifiant bien les paramètres. Le tilt back je suis pas adepte mais je le laisse quand même à 35, une sécurité est nécessaire... Merci à tous pour vos différents aides, n’hésitez pas à me demander des conseils ou si vous avez eu des soucis je serai heureux de vous aider, et dernière chose si vous avez 2 vis qui sort de votre coque m3s c’est «normal» j’ai eu e-roue au téléphone... (voir photo)
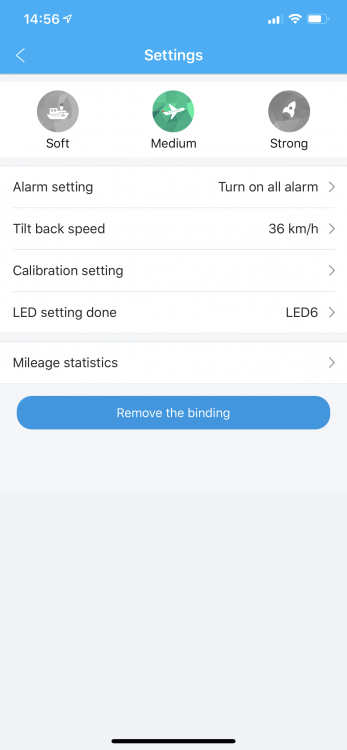

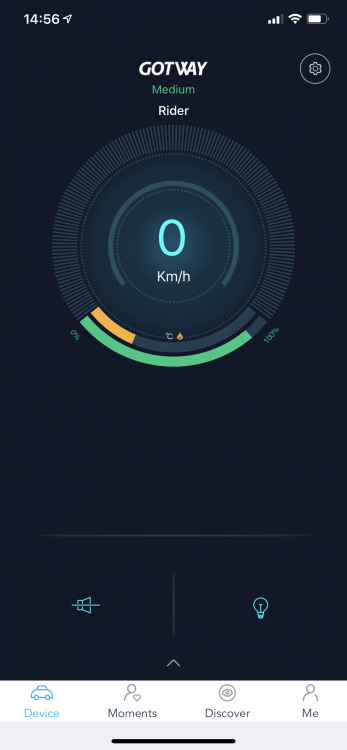

 1 point
1 point -
1 point
-
1 pointc'est pour ça que je t'en parle.......?? au pire tu remplaces moteurs/controleur/lcd par ceux d'une thunder ou Ultra, et tu te retrouve avec un avion de chasse....1 point
-
1 pointJe ne sais pas si cela va t'aider, j'ai aussi un téléphone IOS et une roue qui n'a pas d’application sous ce système d'exploitation. J'ai résolu le problème de configuration de ma roue en achetant un téléphone Androïde de base d’occasion à 50 balles, installé l'application qui va bien dessus et roule ma poule, le téléphone ne sert qu'a ça. Bonne chance.1 point
-
La vache, la jante à pris cher....Tu as de la chance de ne pas être tombé, surtout à 40km/h. Quitte à devoir changer l'ensemble, autant essayer de la redresser ? Plus grand chose à perdre, à la rigueur avec un maillet pour que le choc soit moins violent ? Je pense que c'est jouable. Même si ça abîme ta jante, c'est toujours mieux que de changer....Un coup de peinture pour masquer les éventuels éclats...1 point
-
1 pointC'est le principe de la stabilisation pendulaire d'une roue : elle ne refuse jamais d'accélérer (volontairement) car cela provoquerait le faceplant immédiat du pilote. Dès que le pilote exerce un déséquilibre en avant ou en arrière, le moteur crée une variation de vitesse pour l'annuler, et tout se passe bien tant qu'on reste dans "le domaine de vol" comme on dit en aéronautique. Une roue est très élémentaire, il y a un asservissement qui recherche un équilibre, rien d'autre. C'est comme de tenir un balais en équilibre sur la main, quand ça penche, on bouge la main. Pour une roue, s'il y a trop de déséquilibre : manque de couple moteur = chute. S'il y a trop de vitesse : manque de puissance moteur = chute. C'est ce qui explique un certain besoin de roues puissantes, par les intrépides qui veulent de la vitesse, par les prudents qui veulent de la sécurité. Ces deux notions sont indissociables. Pour aider le pilote et lui faire comprendre qu'il est en train d'atteindre certaines limites, il y a les alarmes sonores (bip ou messages vocaux) et sensitives (tilt back, vibrations). Comme cela a été dit, le sonore est aléatoire dans certains environnements, de plus les oreilles du pilote ne sont pas toujours au top. Avant de contester le tilt back, il faut le connaître. Par facilité, on présente cela comme un relèvement des pédales ce qui est évidemment faux : les pédales n'ont aucune mobilité mécanique pour prendre ce genre d'initiative. Un tilt back est créé par un décalage progressif du point d'asservissement (par rapport à la verticale), ce qui provoque une accélération supplémentaire de la roue, la roue va plus vite que le centre de gravité du pilote, et tend à redresser un déséquilibre excessif. Et le pilote à une fausse sensation de relèvement. C'est une intervention modérée de la roue pour créer des conditions favorables à la décélération, mais certains fadas passent outre et continuent à accélérer les chevilles tordues... Notons qu'un tilt back consomme un peu de ressources moteur, qui ne sont pas toujours disponibles quand le moteur est proche de la saturation. J'ai évoqué les vibrations (moteur), utilisées très rarement, j'ai négligé le tilt front qui est très violent comme sensation mais contre-productif pour le ralentissement. En résumé, le tilt back d'une roue est une limitation relativement modérée, alors que le tilt back d'un gyropode est une limitation franche car le manche repousse le corps du pilote. Dans les deux cas, le terme bridage est inadapté, car la diminution ou la coupure de la puissance est impossible.1 point
-
1 point
-
1 point
-
Oui, parce que ça c’est arrivé!! 2 DT1 reçues le même jour, une des deux avec le moteur arrière phases inversées ! Ça fait drôle... Du coup il faut être encore plus vigilant au démontage, histoire de ne pas inverser au remontage des phases qui le sont déjà...1 point
-
Theoriquement je crois que le 0% est a 48v. Un ami sur sa dt3 cet été lors d’un grosse balade de 100km a fini a 49v sur sa batterie . Bon apres c’est clairement pas conseillé. sinon ouai je trouve elle consomme pas mal la trot sans rouler bourin ( juste en single mode 3), bon deja je fait 500m que j’ai perdu 5% au compteur ?. Mais sur une meme balade mon ami en dt3 avait le meme niveau de batterie que moi, alors que theoriquement je devrais avoir plus de batterie que lui (28ah vs 35ah), peut etre que le fait d’avoir un moteur de 1200 watt au lieux des 800 d’une dt3 explique cette différence (en plus du poid de la trot)1 point
-
Bon courage @Yotraxx et merci de donner suite à ta mésaventure ici. Je sors de mon côté d'une chambre à air crevée et ce fut une bonne galère (démontage/remontage du pneu... on croirait pas comme ça, mais c'est franchement gavant ?). Je te souhaite de vite récupérer tout ce qu'il te faut ? et merci des détails, photos et lieu comme tu dis? À + @Yotraxx1 point
-
1 pointassis / debout sur une roue, c'est clairement du freestyle de haut vol ! Quelqu'un a les coordonnées du proprio de ce clébard ? Il faudrait lui demander s'il ne veut pas poster davantage de toutoutoriels ?1 point
-
1 pointL'axe n'a pas été sollicité, @Sebastien est tombé debout, dans un tas d'immondices d'ailleurs J'imagine que le pied gauche que l'on ne voit pas a aussi été éjecté par la pédale qui s'est probablement repliée. En tout cas, belle rando, merci à tous. J'ai bien apprécié l'Orge que je ne connaissais pas vraiment. En m'arrêtant au rer Cité U, j'ai parcouru 74,5 km. Le parcours un peu écourté ne m'a pas chagriné, circuler de nuit dans Paris est pour moi d'un intérêt assez moyen. Le zigoto qu'on a rencontré avec sa trott' et son incroyable chien motard était bien sympathique, et s'il se rappelle le nom Espritroue et qu'il lit ça, je lui fais un coucou amical.1 point
-
T’as vraiment du taper comme un salaud, quand on prends en compte le pneu de cette Z10. La jante à l’air épaisse en plus. Avec une autre wheel (sauf Monster) t’aurais sûrement chuter et tuer la jante.1 point
-
Heureusement que tu n’as pas eu plus de dégâts que ça. Prenons tout de même deux minutes pour rappeler les fondamentaux en terme de firmware et de wheel : - Vous ne savez pas ce que c’est ? Ne le faites pas tant que vous n’êtes pas 100% au courant de ce que vous faites. Il ne s’agit pas d’une machine à laver ou d’un lave vaisselle - Ne jamais mettre à jour votre wheel sans vous renseigner sur le changelog, et sans avoir des feed-backs positifs de personnes dignes de confiance - Vous n’avez pas besoin des nouvelles fonctionnalités ? L’upgrade n’est pas du tout obligatoire - Garder en tête qu’un upgrade de firmware est généralement définitif (plan galère mis à part) : ne le faites pas à la légère. Alors venant d’une application qui est en test, ... j’en dirai pas plus mais n’en pense pas moins Ride safe, Nrv1 point
-
1 pointBonjour, Très peu de temps après réception de ma DT3, j'ai décidé de l'envoyer chez FUNTROTT pour une révision générale : vérification de jeux divers avec remplacements si nécessaire, câbles trop fins, bavures sur les points de passage des câbles avec risques de sectionnement, réglage des bras de suspension, etc. En lisant tous les problèmes d'ordre mécanique, je me dis que c'est peut-être une bonne idée d'avoir pris cette décision (transport Lyon ---> Citry = galère mais bon ...). J'en profite pour faire installer aussi des MAGURA et on évitera peut-être les disques voilés, enfin normalement ?. La note risque d'être salée mais je devrais normalement limiter un certain nombre de problèmes, je ne suis pas à l'abri d'une panne de contrôleur(s) par exemple. Je pense me fournir aussi en pièces de rechange. Je partage le sentiment de certains, un produit à ce prix ne devrait pas comporter autant de défauts, c'est inacceptable. 2 messages envoyés directement chez MiniMotors SG pour des précisions et aucune réponse (à propos de la spider notamment), leur politique envers les clients n'est pas géniale. On parle même pas du SAV des distributeurs en France, j'ai déjà eu aussi quelques déconvenues. Du moment qu'ils ont vendu, la maintenance ils s'en moquent ou alors ils prennent en charge uniquement s'ils ne peuvent pas faire autrement. Dans le cas contraire, on reçoit des réponses à la con telles que décrites par @madmax Entièrement d'accord avec cette analyse, courage à toi ! Merci @Jeff08 pour ses conseils notamment pour FUNTROTT ? Et je n'ai aucun lien d'aucune sorte avec FUNTROTT ?1 point
-
1 pointC’est pas tous les produits avec des batteries lithium mais plutôt les produits électroniques et c’est pas comparables a nos trottinettes. Dans le cas de tous ces standards de charge rapide a la Qualcommm Quick charge sont des systèmes intègres … avec "BMS" et chargeur qui communiquent entre eux. En gros ca varie le voltage (quick charge 2/3) ou voltage et amperage (quick charge 4) pour bourer les electrons dans la batterie sans trop de surchauffe mais a partir d'un moment il y a du monde la dedans et tu petu plsu continuer a ce rythme sans un deghagement de chaleur qui nuirait a la batterie. Perso je compte pas sur minomotors pour nous developper ou introduite un tel system.1 point
-
1 pointIl n’y a pas vraiment de débat sur le sujet dans le milieu scientifique et industriel : charger la pack de batteries lithium a 100% diminue leur durée de vie utile avec l’exception notable des cellules LiFePO4. Pour ceux qui ont ni le temps ou l’envie de lire beaucoup, voir le tweet d’Elon Musk sur le sujet : entre 30 et 80% Pour ceux qui ont le temps et courage de lire plus sur le sujet (en anglais) voir : https://batteryuniversity.com/index.php/learn/article/how_to_prolong_lithium_based_batteries Charge à 80% pour durée de vie maximum d’après Jeff Dahn. Pour ceux qui ne le connaissent pas Jeff est considéré comme l’inventeur de la technologie pour l’introduction dans batteries lithium dans les ordinateurs portables. Entre autre chose il dirige « Tesla's battery research group” maintenant et supervise la recherche interne Tesla de longévité des batteries. IL explique les mechanisms dans une vidéo de une heure et quart qui est un cours donne a l’Université Dalhousie "Why do Li-ion batteries die and can they be immortal?”. C’est passionnant pour ceux qui ont le temps mais la conclusion est qu’il y a seulement deux choses qui diminue la vie des batteries : (i) la chaleur et (ii) le temps a charge élevée. Mais bien sur c’est plus complexe car la chaleur engendrée par la charge n’est pas linéaire avec un palier existant aux alentours de 80% i.e la batterie chauffe moins quand elle charge de 60 a 80% que quant elle charge de 80 a 100%. Oui, une charge incomplète entraine une perte de balance des cellules et les batteries et systèmes ne sont pas égaux. Les cellules nouvelles de bonnes qualité de fabrication le font a une vitesse bien mois élevée que des batteries de moins bonne qualité et plus ancienne (qu’elles soient utilisée régulièrement ou simplement stockée). Le BMS joue aussi dans cette équation avec la majorité qui font un balancement passif après que la charge soit a 100% et d’autres qui dans notre monde sont le haut de gamme qui interviennent plus tôt. Tesla recommande un balancement tous les trois mois au minium (Model 3) ce qui correspond grosse modo a la recommandations de Grin Technologies a.k.a ebaikes.ca et créateurs du « cycle satiator » de faire un balancement toutes les 100 recharges sur des packs ebike avec cellules haut de gamme. Ceci dit … je me demande toujours quel est l’impact au quotidien de cette tous les chiffres et tableau sont bases sur une « duree de vie » assez arbitraire de 80% comparée a la sortie de la chaine de production et les fameux « cycles » sont pour des recharges complète de 0 a 100%. J’ai vu plein d’articles et de partage d’expérience concernant des batteries en bonne forme après x années / kilomètres en chargeant a 80% mais je suis pas encore tomber sur quelqu’un qui attribue une perte de capacité a une charge trop élevée. Bon voilà, comme ca a été dit chacun fait comme il l’entend.1 point
-
1 pointSource : https://www.mobilityurban.fr/blog/trottinette-electrique/reglementation-vleu-le-canada-autorise-officiellement-la-trottinette-electrique.html1 point
-
1 pointje roule actuellement en trottinette la Ruima mini 4 sur l'entres deux mers je l'ai assuré pour étre considéré comme un véhicule motorisé sans immatriculation style les petit tracteurs ou engins de chantier la vitesse est donc limité en dessous de 30 km/h et une signalitation visuelle apparente obligatoire j'ai donc un mini-gyrophare à led dans le dos sur un gilet fluo des brassard fluo clignotants au poignets un casque et des gants et la trott réglé pour pas dépasser 30 km/h aucun soucis avec la police municipale sur route et j'ai deja éffectué 250 km en 30 jours1 point
-
C’est fait pour moi. Dès réception de mon pneu 2,5 pouces (V10F) j’ai enlevé la roue, coupé la coque à la scie à métaux aux dimensions indiquées par djerr, puis remonté le tout en laissant les 2 trous des cales pieds libres. Ma ks 16s est transformée. Je ne frotte plus les pédales, elle a gagné en stabilité sans rien perdre en nervosité. Le pied quoi. J’attends maintenant les pédales 25 cm commandées sur aliexpress. Pédales reçues et montée.



 1 point
1 point -
1 pointOn est tous d'accord pour dire que certains VAE ou vélos font n'importe quoi sur les pistes cyclables. Mais ils ne sont pas la majorité. Évitons de les stygmatiser ou nous nous exposerons aux mêmes remarques. Parmi nous aussi il y a des abrutis. En fait il faut servir l'argument inverse. Ne nous jugez pas au regard des inconscients, il y en a dans toutes les catégories de véhicules.1 point